本帖最后由 云天 于 2022-8-22 19:21 编辑
【项目背景】
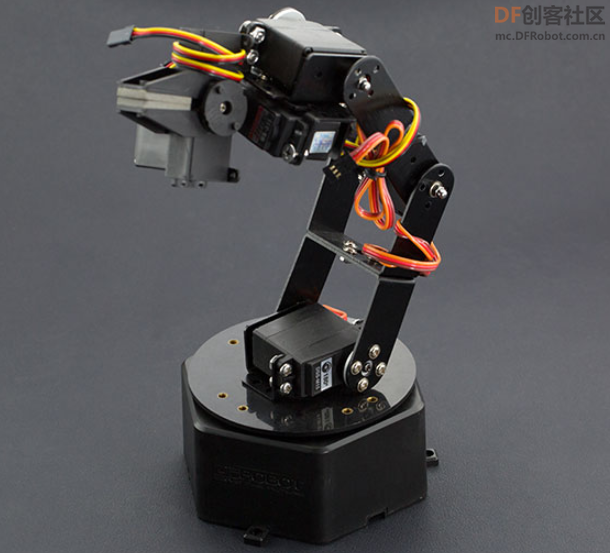
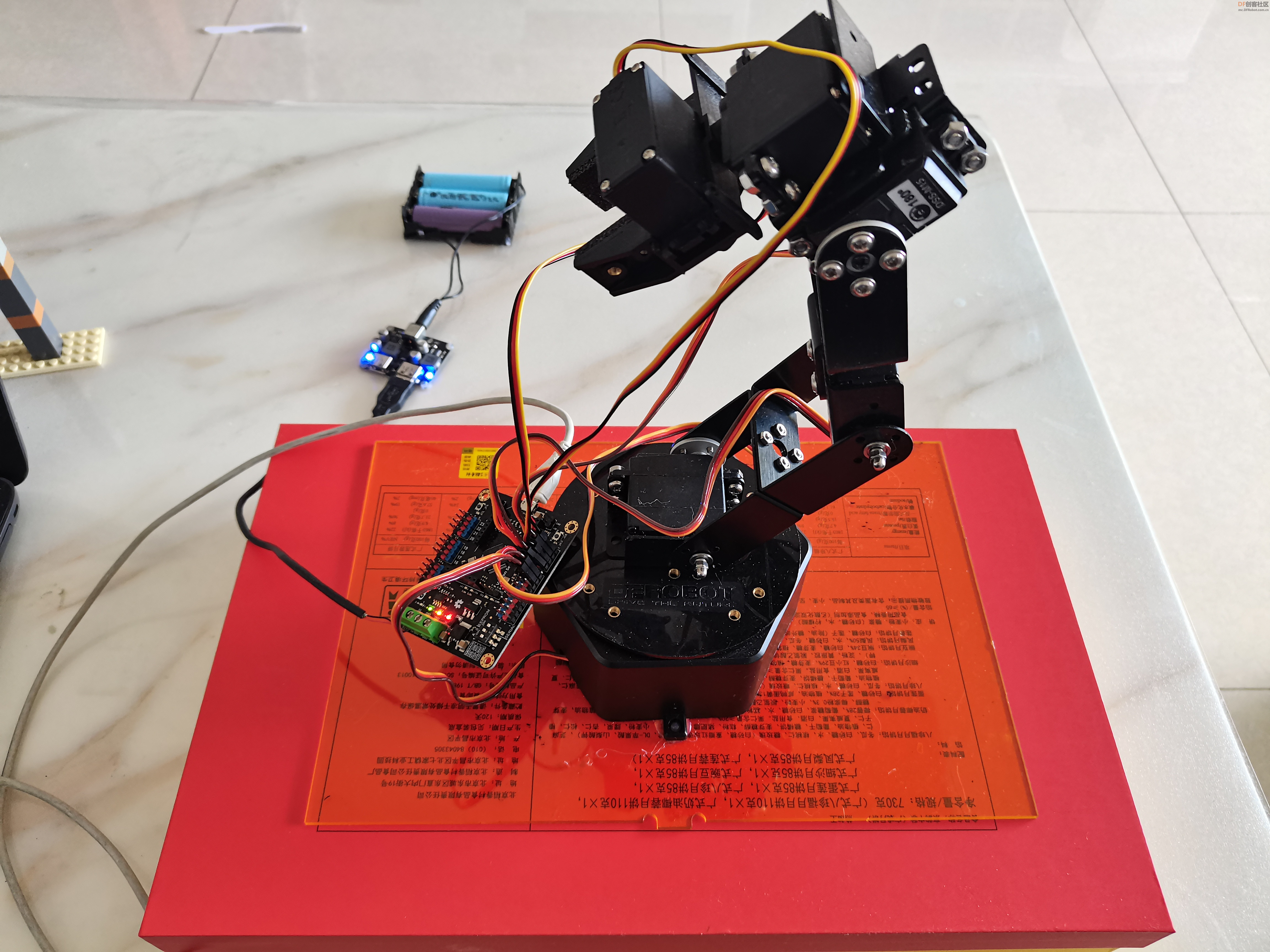
最近入手了一台机械臂(DF 6自由度机械臂),使用威龙24路舵机控制器,配合Veyron_Servo_Driver_24-Channel 软件,实现了一些简单动作后,就一直放在茶几上吃灰。
在做了几个有关Mediapipe相关项目后,今天准备将机械臂与Mediapipe相结合,实现手部运动控制机械臂运动,进行抓取实物、移动位置。此项目将制作、改进、优化整个过程一步一步进行介绍。
【入门知识】
1.机械臂
(1)六自由度机械臂简介
机械臂是机器人技术领域中使用最广泛的自动机械装置。它可以在工业制造,医疗,娱乐服务,军事,半导体制造和太空探索中看到。虽然它们的形状不同,但它们都具有共同的特征,即它们可以接受指令并准确地定位三维(或二维)空间中的点以进行操作。
六自由度机械手臂,顾名思义,由六个关节组成,由伺服电机机械臂驱动。既然它是手臂,那么就有几个关节,可以想象我们的人体手臂,除了肩膀,肘部,手腕三个关节外,加上手指的关节,还有很多关节。我们的机器人手臂也是如此,它使用六个伺服电机来实现简单的手部结构。除了没有人的关节外,还有一些神经组织和神经系统缺失。然而,已经开发出具有“灵巧手”(其可以完成复杂的组装,处理或手动抓取蛋的手)的“人形”机器。
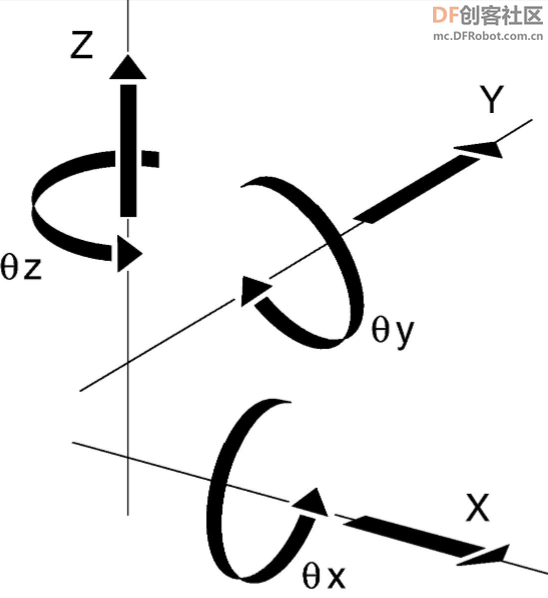
(2)自由度
自由度: 自由度是机器人的一个重要技术指标,它是由机器人的结构决定的,并直接影响到机器人的机动性。
物体上任何一点都与坐标轴的正交集合有关。物体能够对坐标系进行独立运动的数目称为自由度(DOF,degree of freedom)。如下图所示:
2.Mediapipe MediaPipe是一个用于构建机器学习管道的框架,用于处理视频、音频等时间序列数据。这个跨平台框架适用于桌面/服务器、Android、iOS和嵌入式设备,如Raspberry Pi和Jetson Nano。MediaPipe只需要最少的资源。它是如此微小和高效,甚至嵌入式物联网设备都可以运行它。2019年,MediaPipe公开发布后,为研究人员和开发人员开辟了一个全新的机会世界。
【实现过程】
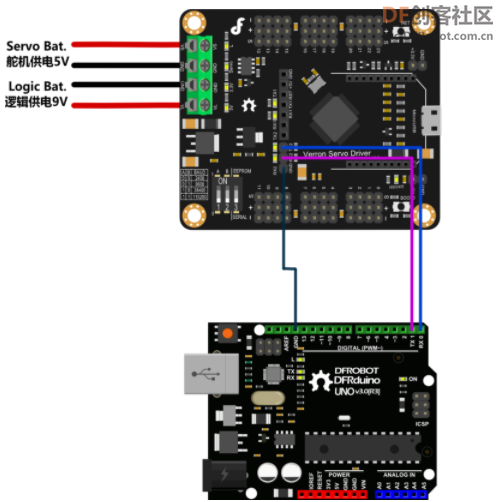
1.使用Mind+软件中的Python模式直接控制威龙24路舵机控制器
在控制器的产品维护文档中,有“Arduino与Veyron_Servo_Driver_24-Channel串口通讯实例”,经测试,成功!刚开始的想法是Python通过Pinpong库与Arduino通信,然后Arduino再发送控制指令给舵机控制器,一是过程繁琐,二是它们都使用到串口通信,互相干扰,经测试结果失败。再看技术文档,既然可以使用串口通信,那么可以去掉中间的Arduino,直接让Python使用串口与舵机控制器进行通信,经测试,成功!
-
- import serial
- import time
- serialPort="COM6"
- baudRate=9600
- ser=serial.Serial(serialPort,baudRate,timeout=0.5)
- print(ser.name)#打印设备名称
- ser.write("#4 P1500".encode())#通道5到达指定位置
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(3)
-
- ser.write("#5 P2250 T5000".encode())#通道5舵机花5秒转到接近中间位置。
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(5)
- ser.write("#5 P750 S1000".encode())#使舵机从2250us移动到750us(大概170度),一共耗时1.5秒。
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(2)
-
- ser.write("#0 P1000 #1 P1000 #2 P1700 #3 P2200 T3000".encode())#同时到达指定位置
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(3)
-
- ser.write("#0 P2100 #1 P2200 #5 P1000 #3 P1500 T3000".encode())#同时到达指定位置
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(3)
- ser.close()#关闭端口
2.移动物品
使用单舵机移动、多舵机同时移动、时间控制、速度控制多种方法,实现循环移动固定位置物品。-
- import serial
- import time
- serialPort="COM6"
- baudRate=9600
- ser=serial.Serial(serialPort,baudRate,timeout=0.5)
- print(ser.name)#打印设备名称
- while 1:
- #舵机4回中间位置,机械臂竖直
- ser.write("#4 P1500 T3000".encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(3)
- #舵机0开口最大,其它舵机回中间位置
- ser.write("#0 P800 #1 P1500 #2 P1700 #3 P1500 #5 P1500 T5000".encode())#同时到达指定位置
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(5)
- #舵机1抬头
- ser.write("#1 P2400 S500".encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(2)
- #舵机4前倾
- ser.write("#4 P300 S500".encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(2)
- #舵机3稍前倾
- ser.write("#3 P1800 S500".encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(2)
- #舵机2钳口摆正
- ser.write("#2 P1700 S500".encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(2)
- #舵机0钳口夹紧
- ser.write("#0 P1800 S500".encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(2)
- #除舵机0钳口
- ser.write("#1 P1500 #2 P2000 #3 P1500 #4 P1500 #5 P1500 T5000".encode())#同时到达指定位置
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(5)
- #
- ser.write("#1 P2400 S500".encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(2)
- #
- ser.write("#5 P500 S500".encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(2)
- #
- ser.write("#2 P1800 S500".encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(2)
- #
- ser.write("#4 P300 S500".encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(2)
- #
- ser.write("#3 P1600 S500".encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(2)
- #
- ser.write("#0 P800 S500".encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(2)
-
- ser.close()#关闭端口
3.Mediapipe手部运动控制
首先通过Mind+python模式下的库管理安装Mediapipe、cvzone,安装好后,结合上面的程序,编写智能控制机械臂程序:
-
- import cv2
- from cvzone import HandTrackingModule as hd
- import serial
- import time
-
-
-
- def numberMap(x, in_min, in_max, out_min, out_max):
- return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
- def main():
- serialPort="COM6"
- baudRate=9600
- ser=serial.Serial(serialPort,baudRate,timeout=0.5)
- length1=0
- P=""
- start_time=time.time()
- cap = cv2.VideoCapture(0)
- detector = hd.HandDetector(detectionCon=0.8, maxHands=1)
- P="#0 P1500 #1 P2400 #2 P1700 #3 P1500 #4 P1500 #5 P1500 T1000"
- ser.write(P.encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(1)
- while True:
- # Get image frame
- success, img = cap.read()
- img=cv2.flip(img,1) # 保存水平翻转图片
- # Find the hand and its landmarks
- hands, img = detector.findHands(img) # with draw
- # hands = detector.findHands(img, draw=False) # without draw
-
- if hands:
- # Hand 1
- hand1 = hands[0]
- lmList1 = hand1["lmList"] # List of 21 Landmark points
- bbox1 = hand1["bbox"] # Bounding box info x,y,w,h
- centerPoint1 = hand1['center'] # center of the hand cx,cy
- handType1 = hand1["type"] # Handtype Left or Right
- length, info, img = detector.findDistance(lmList1[8][0:2], lmList1[4][0:2], img) # with draw
- fingers1 = detector.fingersUp(hand1)
- length1=250-int(length)
-
- length1=numberMap(length1, 0, 250, 800, 2200)
- cx,cy=detector.midpoint(lmList1[8][0:2], lmList1[4][0:2])
- disX=630-cx
- disX=numberMap(disX, 100, 530, 0, 2200)
-
- disY=370-cy
- disY=numberMap(disY,20, 350, 400, 2000)
- print(cy)
- if time.time()-start_time>0.5:
- P="#4 P"+str(disY)+" S500"
- ser.write(P.encode())
- time.sleep(0.005)
- ser.write("\r".encode())
-
-
- P="#5 P"+str(disX)+" S500"
- ser.write(P.encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- start_time=time.time()
-
- P="#0 P"+str(length1)+" S500"
- ser.write(P.encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- start_time=time.time()
-
- # Display
- cv2.imshow("Image", img)
- cv2.waitKey(1)
-
-
- if __name__ == "__main__":
- main()
-
4.进行优化
通过测试,上面的视频也可发现,有时舵机运行过快,出现抖动,这应该是由于舵机运行使用的是速度控制,中间的两个指令的时间间隔不足(上个指令舵机还没有到达指定位置),造成抖动。所以对程序进行修改,将速度控制修改为时间控制(1秒内到达指定位置),并将两指令的发送最小时间间隔也设定为1秒。
-
- import cv2
- from cvzone import HandTrackingModule as hd
- import serial
- import time
-
-
-
- def numberMap(x, in_min, in_max, out_min, out_max):
- return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
- def main():
- serialPort="COM6"
- baudRate=9600
- ser=serial.Serial(serialPort,baudRate,timeout=0.5)
- length1=0
- P=""
- start_time=time.time()
- cap = cv2.VideoCapture(0)
- detector = hd.HandDetector(detectionCon=0.8, maxHands=1)
- P="#0 P1500 #1 P2400 #2 P1700 #3 P1500 #4 P1500 #5 P1500 T1000"
- ser.write(P.encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- time.sleep(1)
- length_pre=100
- cy_pre=240
- cx_pre=320
- while True:
- # Get image frame
- success, img = cap.read()
- img=cv2.flip(img,1) # 保存水平翻转图片
- # Find the hand and its landmarks
- hands, img = detector.findHands(img) # with draw
- # hands = detector.findHands(img, draw=False) # without draw
-
- if hands:
- # Hand 1
- hand1 = hands[0]
- lmList1 = hand1["lmList"] # List of 21 Landmark points
- bbox1 = hand1["bbox"] # Bounding box info x,y,w,h
- centerPoint1 = hand1['center'] # center of the hand cx,cy
- handType1 = hand1["type"] # Handtype Left or Right
- length, info, img = detector.findDistance(lmList1[8][0:2], lmList1[4][0:2], img) # with draw
- fingers1 = detector.fingersUp(hand1)
- length1=250-int(length)
-
- length1=numberMap(length1, 0, 250, 800, 2200)
- cx,cy=detector.midpoint(lmList1[8][0:2], lmList1[4][0:2])
- disX=630-cx
- disX=numberMap(disX, 100, 530, 0, 2200)
-
- disY=370-cy
- disY=numberMap(disY,20, 350, 400, 2000)
- print(cy)
- if time.time()-start_time>1:
-
- if abs(cy-cy_pre)>5:
- P="#4 P"+str(disY)+" T1000"
- ser.write(P.encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- cy_pre=cy
- if abs(cx-cx_pre)>5:
-
- P="#5 P"+str(disX)+" T1000"
- ser.write(P.encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- start_time=time.time()
- cx_pre=cx
- if abs(length-length_pre)>5:
- P="#0 P"+str(length1)+" T1000"
- ser.write(P.encode())
- time.sleep(0.005)
- ser.write("\r".encode())
- length_pre=length
- start_time=time.time()
-
- # Display
- cv2.imshow("Image", img)
- cv2.waitKey(1)
-
-
- if __name__ == "__main__":
- main()
-
|




 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶





 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






