|
17103| 1
|
[项目] L298N_红色直流电机驱动模块+掌控板的应用:仰望3动力升级 |
本帖最后由 rzyzzxw 于 2023-1-2 13:14 编辑 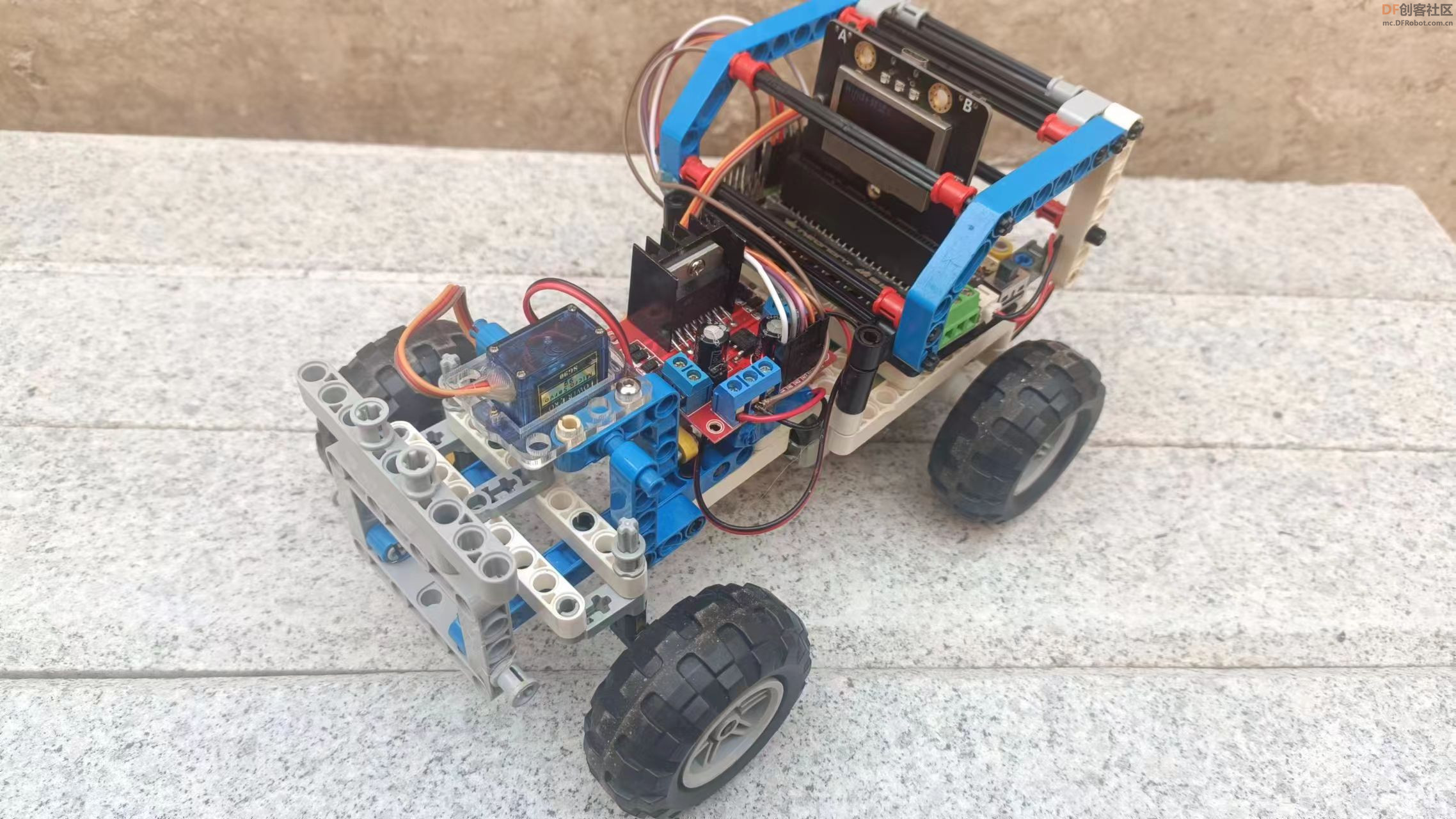 【背景】 仰望小车3不是这个帖子的主角,主角是这个红色的模块L298N_红色直流电机驱动模块: 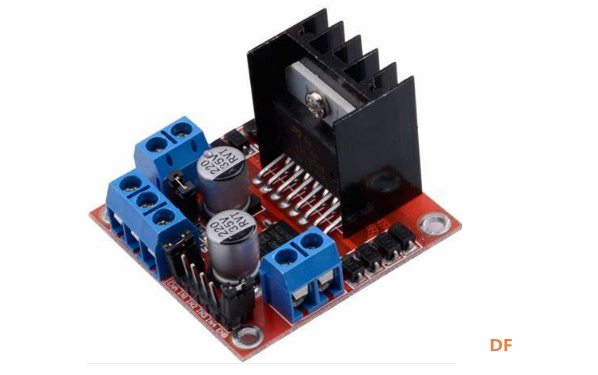 看习惯了DF电子模块的精致,初次看到它时,觉得丑陋,可是当我能把它和掌控结合一起用起来后,嗯,还可以,不那么难看了。 仰望3号是在跨年夜里搭成的,还行,能跑起来,但动力稍稍差了一点,元旦的今天,孩子在写作业,我在探索对它动力升级。 那个DF直流电机驱动模块L298N直流电机驱动模块DF-MD V1.3:  已经用在仰望2号上了,车子也蛮帅气,也不想拆它了,于是,我又默默的取出了L298N_红色直流电机驱动模块,打开社区里亮工和Nick的教程帖,认真学习起来。 李亮:【Mind+】(超详细)如何使用L298N电机驱动图形编程控制电机 https://mc.dfrobot.com.cn/thread-298567-1-1.html?fromuid=727937 (出处: DF创客社区 - 分享创造的喜悦) Nick:【Mind+扩展库发布】:L298N_红色直流电机驱动模块 https://mc.dfrobot.com.cn/thread-305753-1-1.html?fromuid=727937 (出处: DF创客社区 - 分享创造的喜悦) 【学习】 先学习的是李亮工程师的教程:(自己学习请点开亮工帖子认真研读,下面摘要只是方便我记忆) 摘要: L298N参数: 参数一般只关心如下两个: 逻辑电压(控制端口电压):5V 驱动电压(电机电压):5V-35V (我计划用8V锂电供电,在这个范围中) 驱动电流(电机电流):2A(MAX单桥) 意味着这个板子适合用5V引脚的主控板驱动(例如arudino系列),而3.3V引脚的主控板可能就不能用了(例如mcirobit、掌控板、esp32)。这个板子驱动的一般都是小电流的电机,例如TT电机(小黄马达)、N20电机这一类的。(我要用掌控板做主控,3.3V,好像不太好用哦。上次我按Nick的教程测试,电机只能勉强转起来,没有一点力量的呢。) 接下来看L298N的控制方法:(现在这个图片能看懂了,实践很要紧) 引脚说明: 输出A、输出B:接两个电机,不分正负,反了只会反转。(换线头可以调方向) GND:电源地,需要与主控板的GND用一根杜邦线连接到一起(共地)。(这一点很重要的) 12V供电:给电机供电的接口,此处要独立供电,最好不要从主控板引电。 5V供电:此为电压输出口,可以使用这个口给主控板供5V电源,但不推荐这么用。 板载5V使能:此跳线帽接起来之后上面的“5V供电”口才有5V电压输出。 通道A、通道B使能(ENA、ENB):此接口高电平则电机可以运行,低电平则电机停止运行,一般直接跳线帽短接到高电平,即一直使能,可以拔掉跳线帽接到主控板pwm模拟输入端口实现调速(我要调速,就要拔掉跳帽了)。 逻辑输入(IN1、IN2、IN3、IN4):这两个接口控制电机正反转,IN1和IN2控制电机M1,IN3和IN4控制电机M2. 具体控制信号如下图(重点图片): 简单理解(亮工神总结): 电源接线: 从12V和GND供6-12V的电压。 L298N和主控板的GND使用一根线连接起来。 板载5V使能跳线帽不动。 电机接线: 两个电机分别接到M1和M2上。 信号控制: ENA和ENB跳线帽拔掉,使用杜邦线分别接到主控板两个PWM模拟输出口。 IN1和IN2,IN3和IN4分别接到主控板数字口。 一图说明: 以Arduino uno为例(例图不是掌控,我们要在大脑中结合掌控扩展板翻译成掌控的接线图) 其中:(这是例图的接线) ENA接D5 (PWM口) ENB接D6 (PWM口) IN1接D3 IN2接D4 IN3接D8 IN4接D7 我用L298N_红色直流电机驱动模块和掌控扩展板的接线方式(可以更换的哦,我这样安排是方便写程序,好记): ENA接 P8 (PWM口) ENB接 P9 (PWM口) IN1接 P13 IN2接 P14 IN3接 P15 IN4接 P16 提示:记得L298N和主控板的GND使用一根杜邦线连接起来 电机1、2分别接电机接口 不分正负,换线头可以调方向 8V锂电正极 接 12V接口 负极接GND口 掌控扩展板用3.7v锂电供电  接下来进行编程: 使用Mind+,下载和安装按照官网教程进行即可(http://mindplus.cc ) 打开Mind+,切换到“上传模式”,“扩展库”>“主控板”>选择“掌控板” 注意:如果对mind+不了解可以先学习一下官方教程:http://mindplus.dfrobot.com.cn L298N的驱动只有数字输出和模拟输出即可控制,因此不用再加载扩展模块。 首先让M1正转起来: 根据信号图,只需要让IN1高电平,IN2低电平,ENA输出PWM调速即可。 程序如下,让电机M1以800的速度正转。(掌控板的调速范围是0-1023。) 上传运行之后如果电机不转,则检查电源接线是否正确,是否共地,信号线是否正确,是否接触良好,尝试将速度调到最大。  接下来测试M1反转,只需要让IN1低电平,IN2高电平即可: 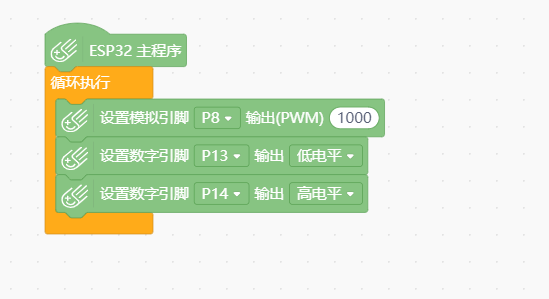 正5秒,反5秒,停1秒,重复3次  接下来测试M2正转,让IN3高电平,IN4低电平即可 程序如下,让电机M2以600的速度正转。 上传运行之后如果电机反转了,只需要把M2电机的两个线调换即可。 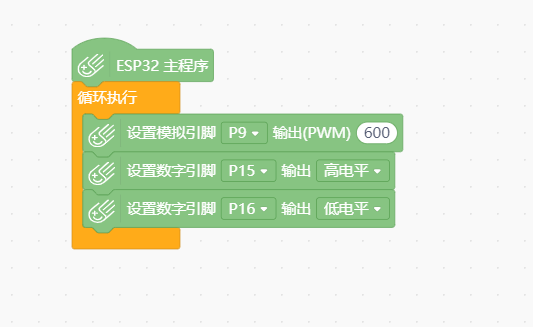 接下来测试M2反转,IN3高电平,IN4低电平即可 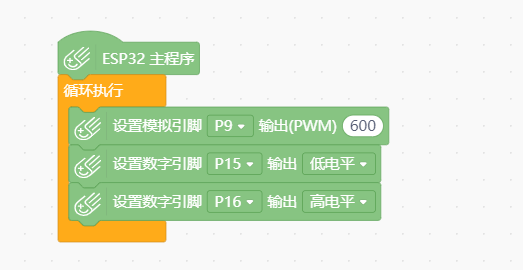 最后测试停止功能,停止电机转动只需要把速度设置为最低即可: 程序如下,两个轮子同时以800速度反转5秒,然后停止3秒。 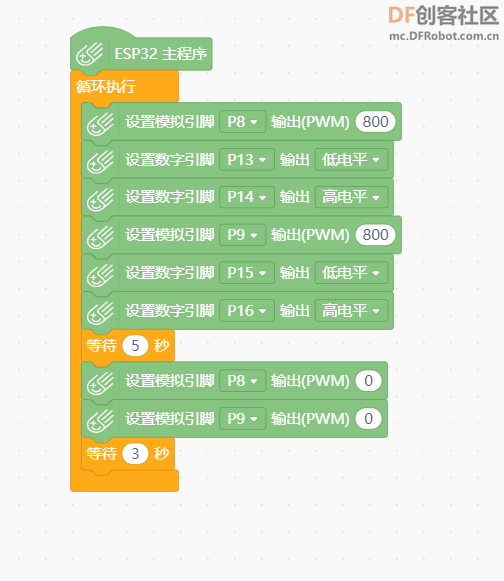 经过这个测试,则我们就可以控制电机了。 考虑到单独使用引脚控制不方便,我们可以使用”函数“功能,将这几个功能变成一个个函数: 添加一个输入参数为速度,方便速度的控制: 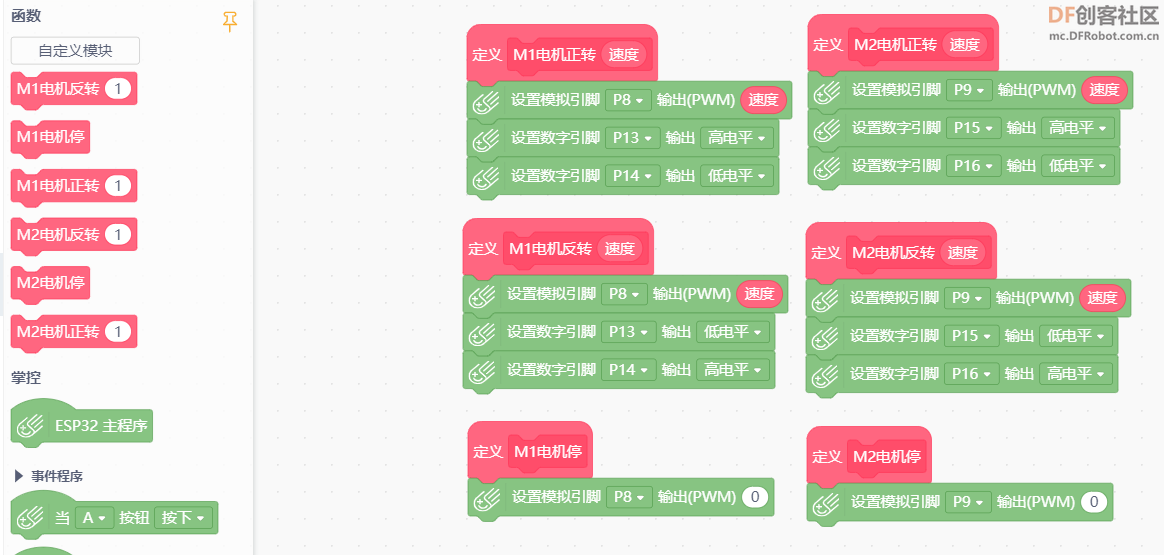 测试一下,双电机1000速度正转1秒,600速度反转1秒,停1秒。  那么,后面仰望小车的遥控控制就可以很方便完成了。 程序如下,仰望小车3L298N_红色直流电机驱动模块版: 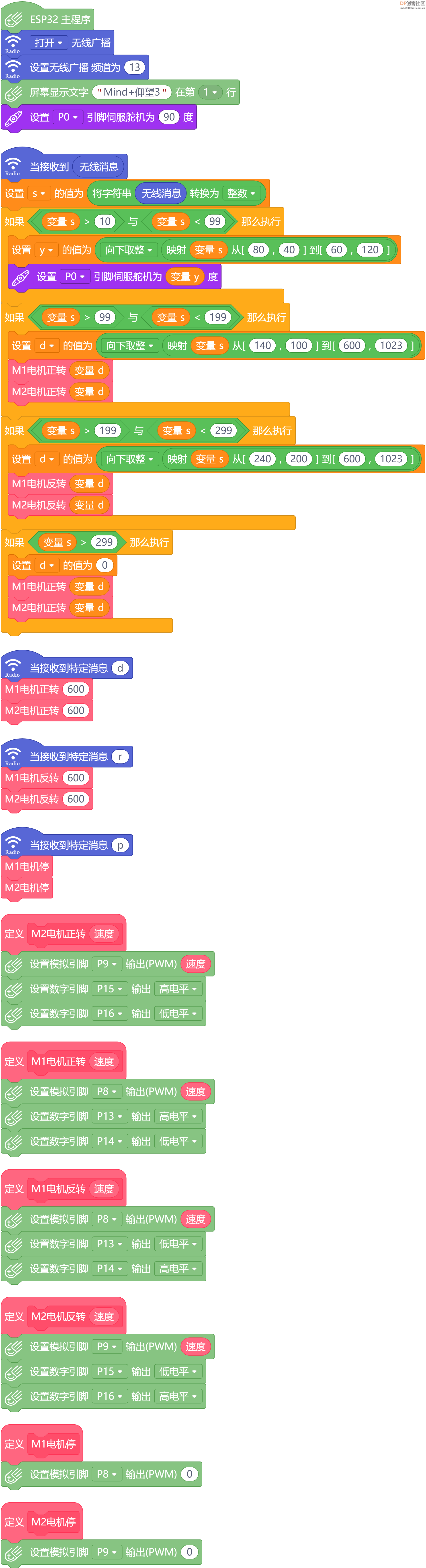 遥控器仍然沿用前面帖子的配置: 程序如下 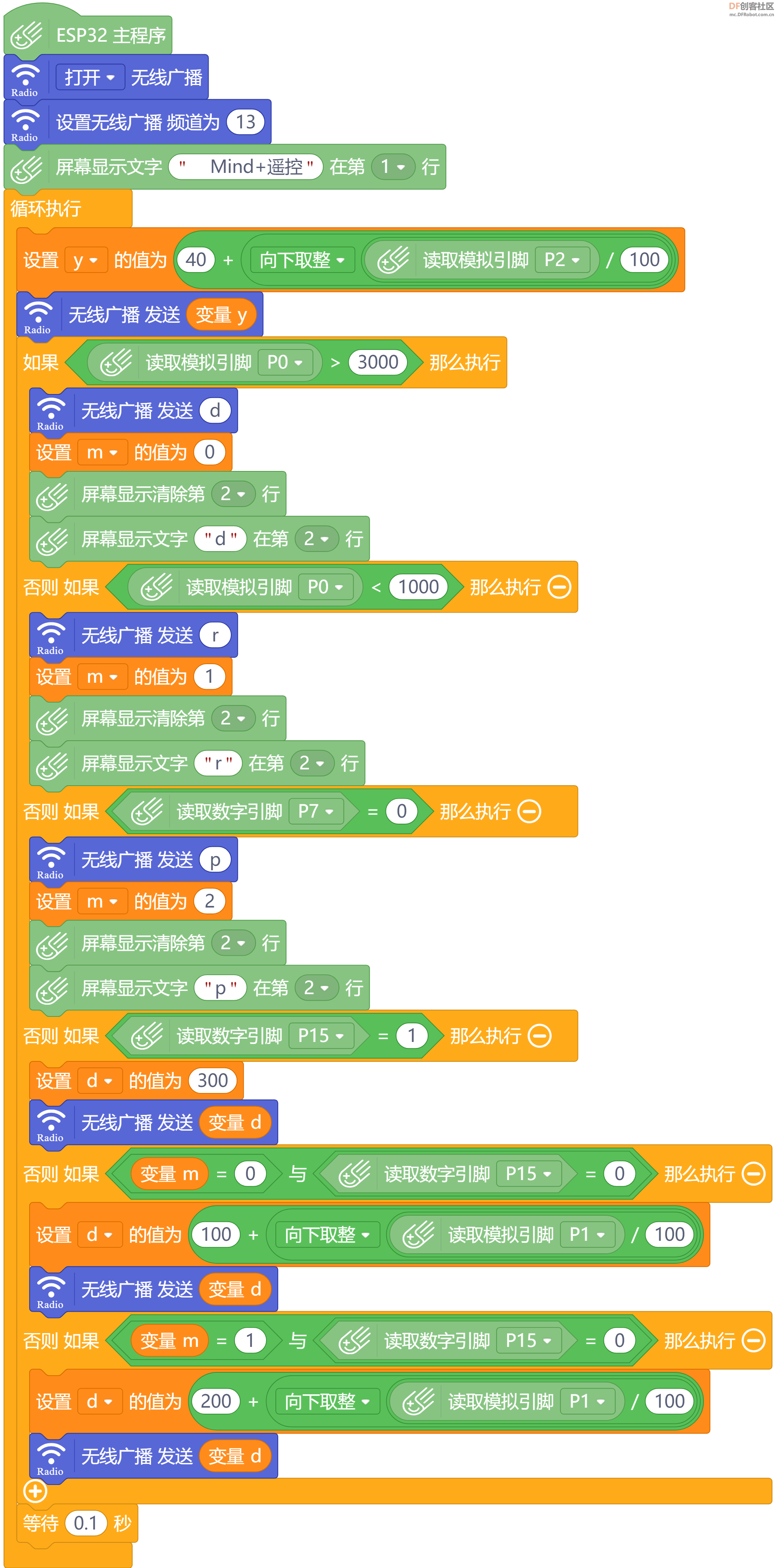 【小结一下】 1、经过测试,L298N_红色直流电机驱动模块在掌控3.3伏逻辑电压下也还可以工作。 虽然没有aduino那样5V逻辑电压的效果好,基本上还算可以。2、现在再看L298N参数:逻辑电压(控制端口电压):5V 这个逻辑电压的意思终于明白了,就是IN1,IN2,IN3, IN4, ENA,ENB它们的电压啊。这个红色驱动模块如果用在5V电压的aduino上,同样的驱动电压(电机电压)情况下应该能发挥更强大的驱动力吧。 3、按这个思路走,mPython也可以给L298N_红色直流电机驱动模块编写程序了(后面再汇报结果)。  仰望红色电机驱动模块版.rar 仰望红色电机驱动模块版.rar【感谢】李亮工程师的详细教程。 |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









