|
1327| 1
|
[项目] 【Arduino 动手做】B-Robot 3 : DIY ESP32 Wifi 自平衡机器人 |
|
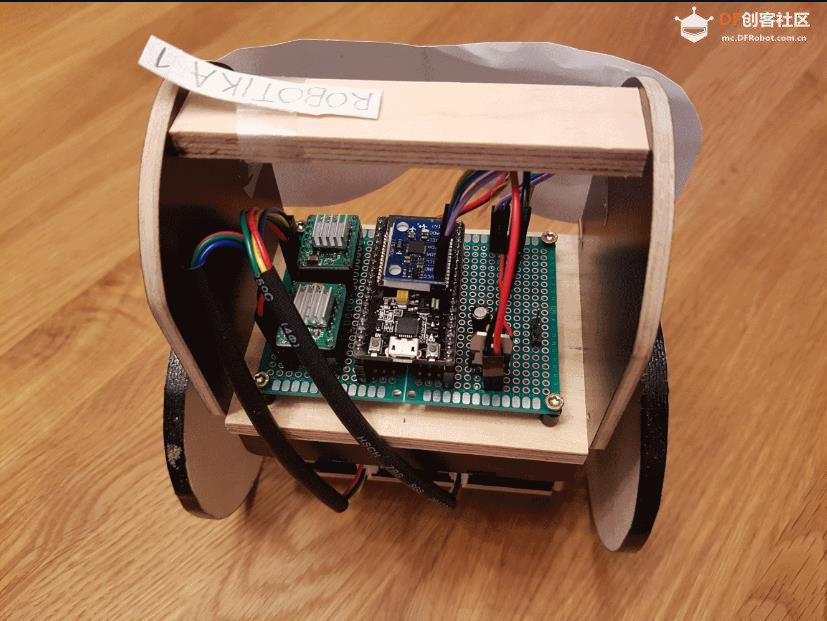
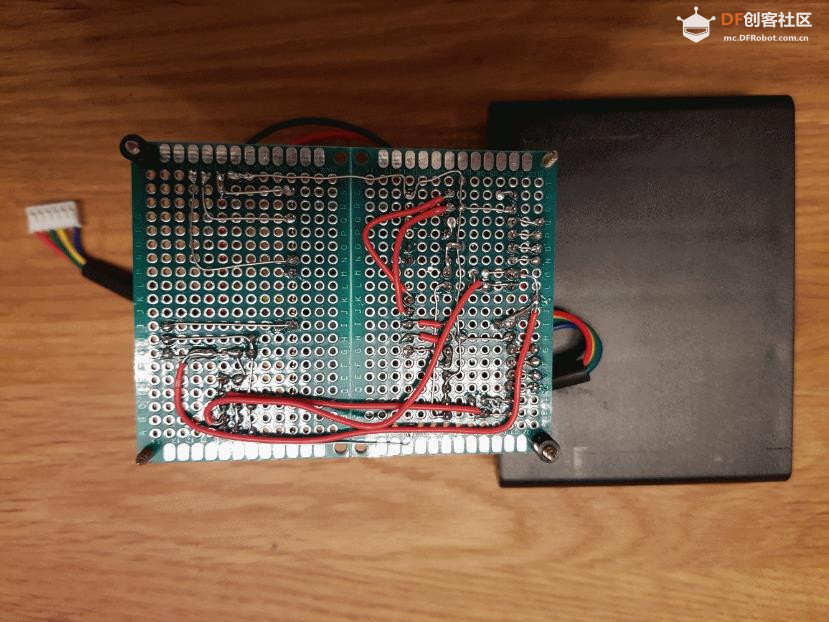
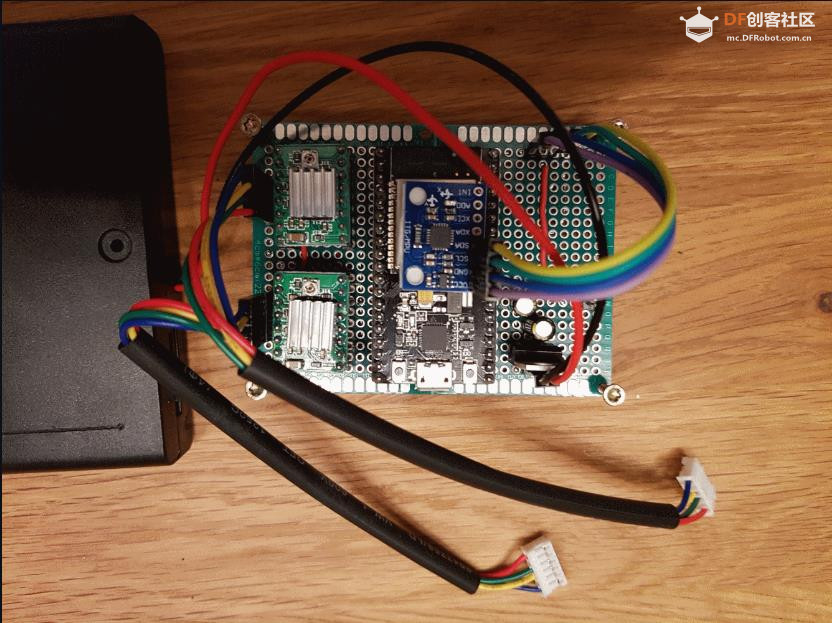
最近好像我一直在制作自平衡机器人,但我又做了一个……(^_^;) 作为对之前版本的改进,我们修改了框架,添加了伺服器,并将步进电机更改为标准 NEMA14。 这款自平衡机器人基于 BROBOT EVO,后者是开源的,可在 jjrobots 上获取。它发布在 B-Robot 论坛上,但链接目前已失效。 用 3D 打印机制作的框架 主要部件 电路图 用 3D 打印机制作的框架 框架采用PLA耗材。由于伺服安装和步进电机规格的不同,与之前的型号相比有所变化,但尺寸基本相同。以下是分解图和组装图。 主要部件 除了步进电机和舵机之外,这个机器人和我之前做的B-Robot几乎一样,可以参考一下。 电路图 这是添加了伺服器的电路图。 通用板采用70mm x 50mm。 ESP32 和 DRV8825 的母排针脚以及步进电机和伺服电机的排针脚排列如图所示。短母排针脚用于 MPU6050,位于 ESP32 下方。5V 稳压器会变得很热,因此需要安装散热器。散热器右侧是电源和开关的块状连接器。 MPU6050 是云台控制器自带的,市售的 MPU6050针脚数不同,安装时需要注意方向。 正向是指朝向图像的前方,这款 MPU6050 就是这种情况。市售的 MPU6050 看起来如下图所示。 ↓ 箭头指向前方 电路板已经完成了,但仔细一看,我才意识到我忘了两个用于 LED 的 1KΩ 电阻。我把它们安装在电路板的空位上,并接好了线。有了 ESP32,元件数量更少,接线也更容易。 从框架的**图中可以看到,电路板通过 2mm 自攻螺钉固定在电路板上,步进电机通过 8mm x 3mm 螺钉固定。 电路板板和侧框用3mm丝锥用尼龙螺丝固定(如果没有丝锥,可以使用3mm丝锥螺丝)。 将O形圈套在轮子上,并用3毫米自攻螺钉将其固定在轴上。对于SG90,舵机从后部用2毫米自攻螺钉固定。对于MG90S,舵机从前部插入,并用自攻螺钉固定。按下开关。 电池如图所示用魔术贴固定在车架上。从车辆后部看,从左侧开始,连接器的顺序为伺服器、左电机、右电机。 画框盖板的制作方法是:将0.5毫米厚的PVC板切割成83毫米 x 160毫米的尺寸,然后将其嵌入画框的凹槽中。将图案印在贴纸上,然后粘贴上去。   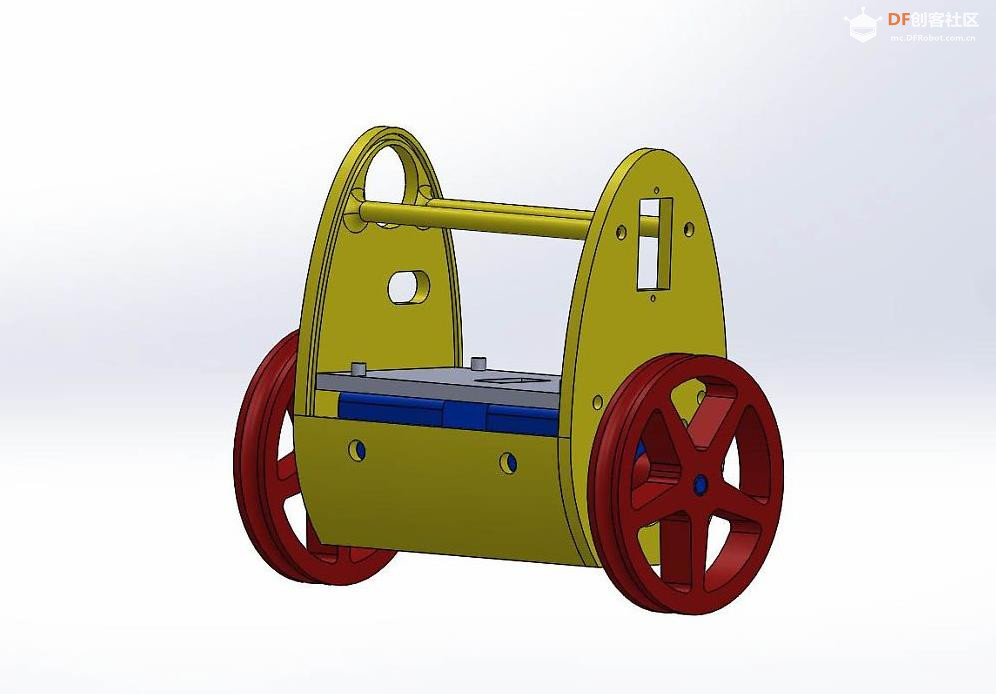 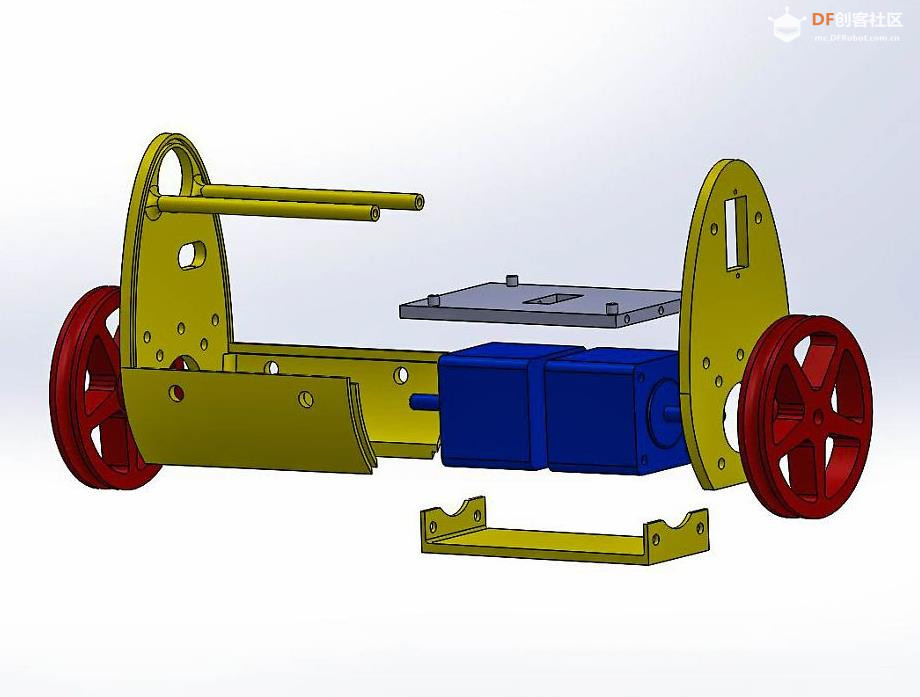 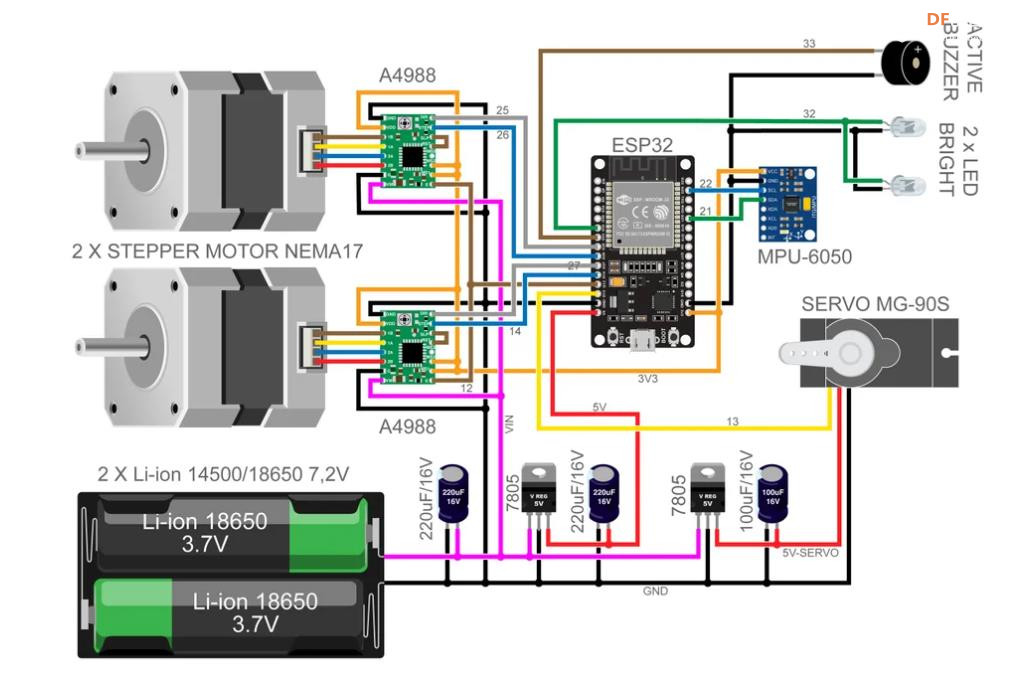 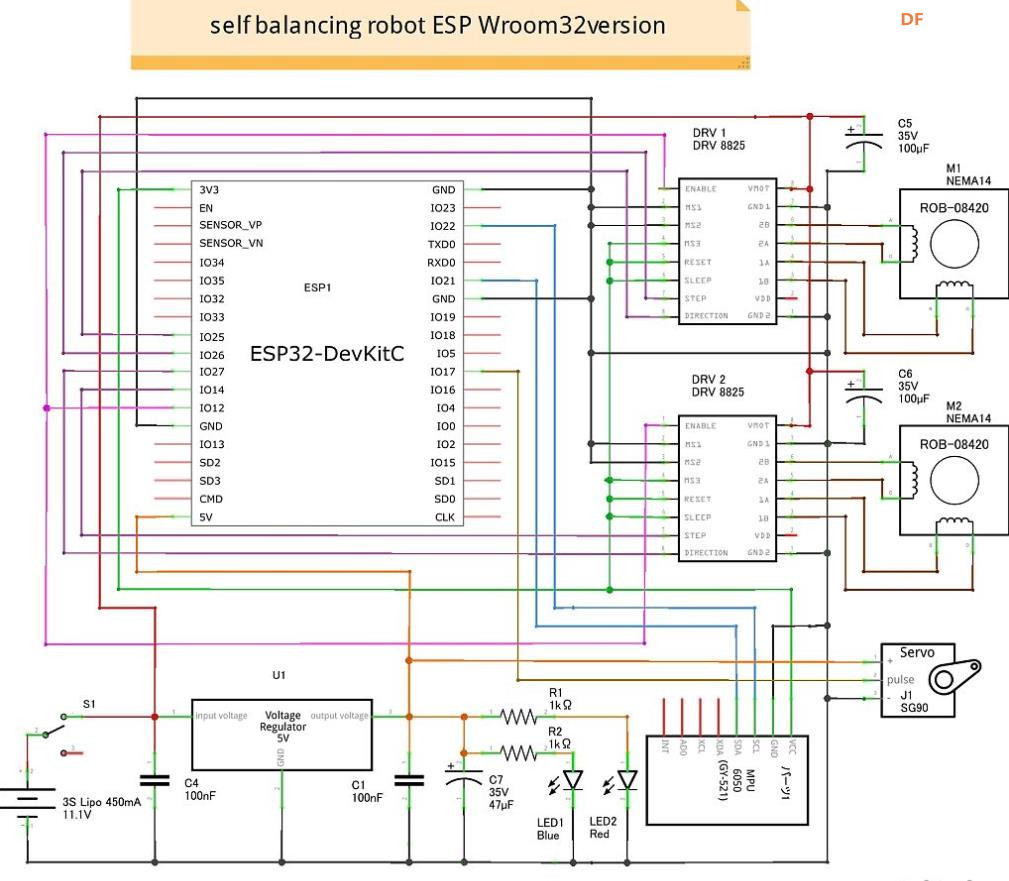 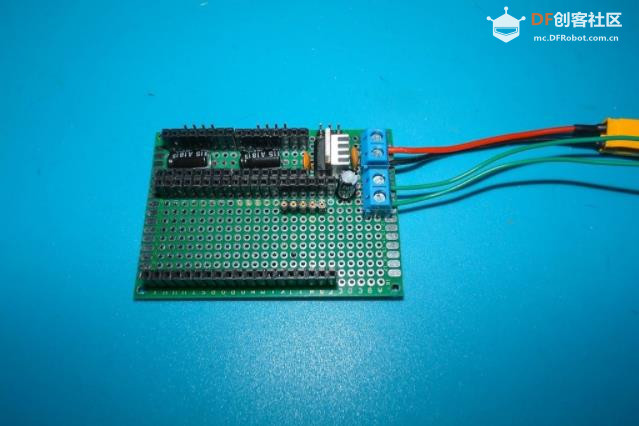 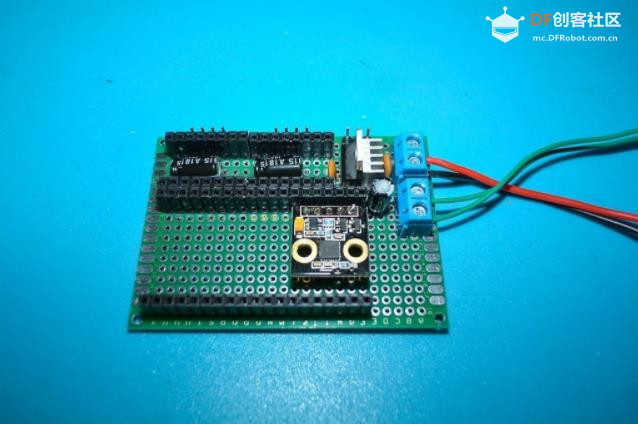 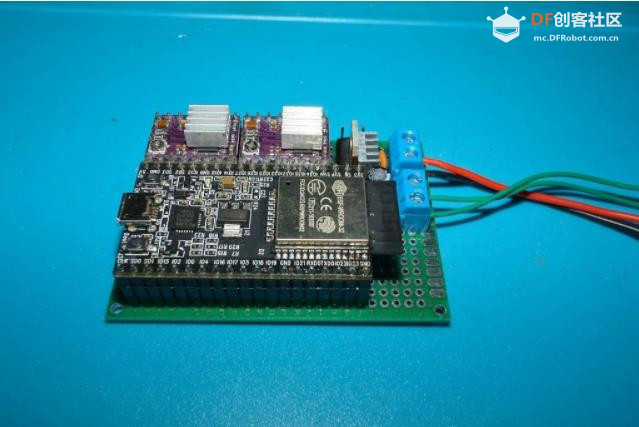 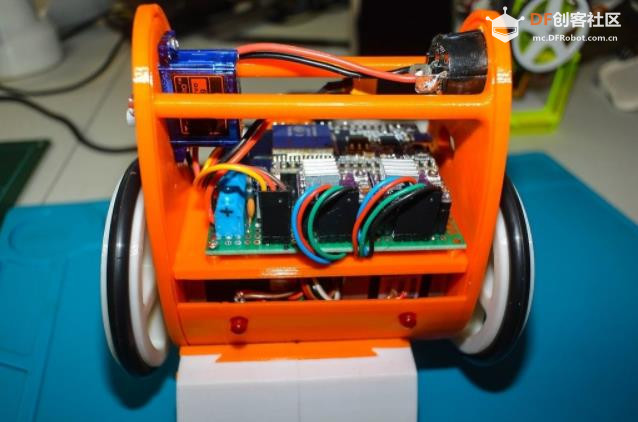 |
   【Arduino 动手做】B-Robot 3 : DIY ESP32 Wifi 自平衡机器人 项目链接: https://blogdaichan.hatenablog.com/entry/%3Fp%3D7129 https://blogdaichan.hatenablog.com/entry/%3Fp%3D7165 项目作者:Daichan ( id: blogdaichan ) 参考资料: https://www.instructables.com/DI ... bot-B-Robot-ESP32-/ 项目视频 :https://www.youtube.com/watch?v=42CqTkvmGMg https://www.youtube.com/watch?v=tZynIj1StpM 项目代码:https://github.com/ghmartin77/B-ROBOT_EVO2_ESP32 https://drive.google.com/file/d/ ... aGJaYy3k2D7bsu/view 3D 文件:https://www.thingiverse.com/thing:2306541 https://drive.google.com/file/d/ ... lTmDEM9zWmjJbQ/view  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






