|
11186| 3
|
[漂移驴车项目] 【漂移驴车】第九步 启动小车并收集数据 |
如果前面的八步都完成了,就可以开始跑车了。启动你的车
这一步可能会让你的驴车起飞的, 强烈建议大家再校准的时候,前进的油门调低一些,避免开机驴车暴走。
打开驴车目录并启动驴车 此脚本将启动驴车,其中包括一个 Web 服务器部分,可以让你控制驴车。 打开浏览器,并通过以下 URL控制驴车:
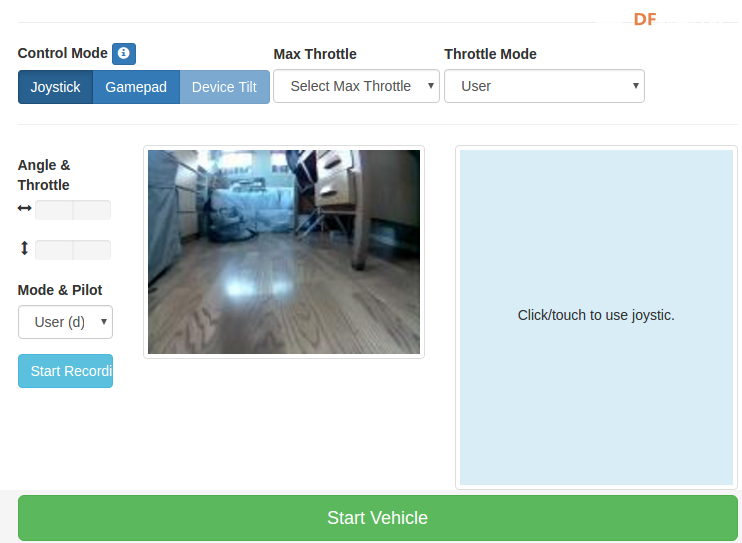
使用 Web 控制器驱动
你可以在电脑上选择“ USER” 模式,就是mode部分,然后右侧的框里面拖动鼠标即可开车。
键盘快捷键
设置XBOX手柄控制 或者,如果你不想每次都添加 --js,请修改myconfig.py, 这部分内容, 用你喜欢的编辑器编辑好后保存: 操纵杆控制 只要油门不为零,就会记录驾驶数据 - 只要处于用户模式!请注意 data目录的内容,图片都在data/images里面! 注意大小!
官方文档中这么描述的,但是我的手柄使用的时候,稍微有些不同,实际上用的比较多的还是使用左右两个模拟摇杆, 左手的左右控制方向, 右手的上下控制油门和倒退。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 创作达人
创作达人
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖






