|
21366| 16
|
[漂移驴车项目] 【漂移驴车】第十步 树莓派本地训练数据并自动驾驶 |
|
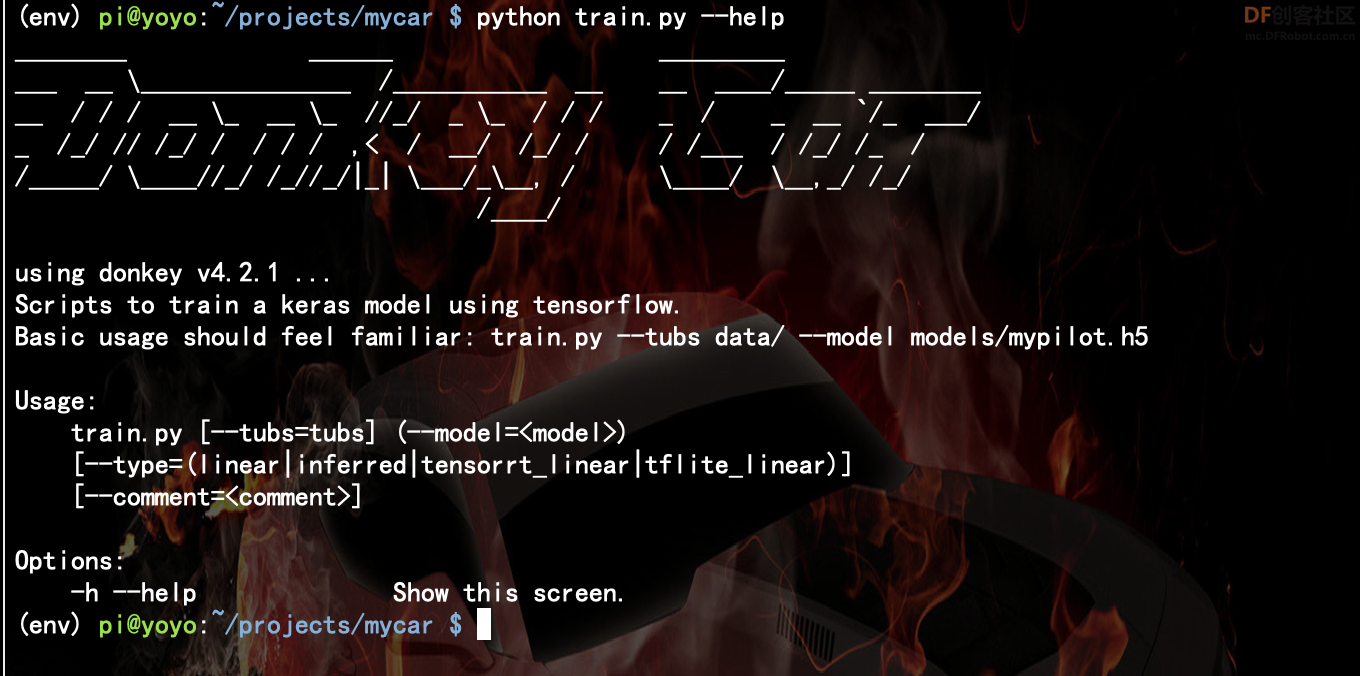
本帖最后由 yoyojacky 于 2021-11-25 21:50 编辑 官方提示: 使用 Keras 训练自动驾驶仪 当你可以顺利稳定的驾驶驴车后,就可以使用Keras训练神经网络训练驴车自动驾驶了。 训练步骤
来进行训练....实测有效. 模型将被放入文件夹中models/目录并命名为mypilot.h5. 这训练的时间根据你训练的数据大小有所变化,如果你训练时采集的数据比较多,时间会比较久。请耐心等待。 等训练完了,直接执行下面的命令来启动驴车。 如果车子应该可以自己开车了,恭喜你,你已经完成了第一步驴车自动驾驶的操作。 如果你的驴车完全没有反应,或者和我的驴车一样,一打开自动驾驶就像野驴般的横冲直撞,也不要气馁,继续采集数据,训练,自动驾驶。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶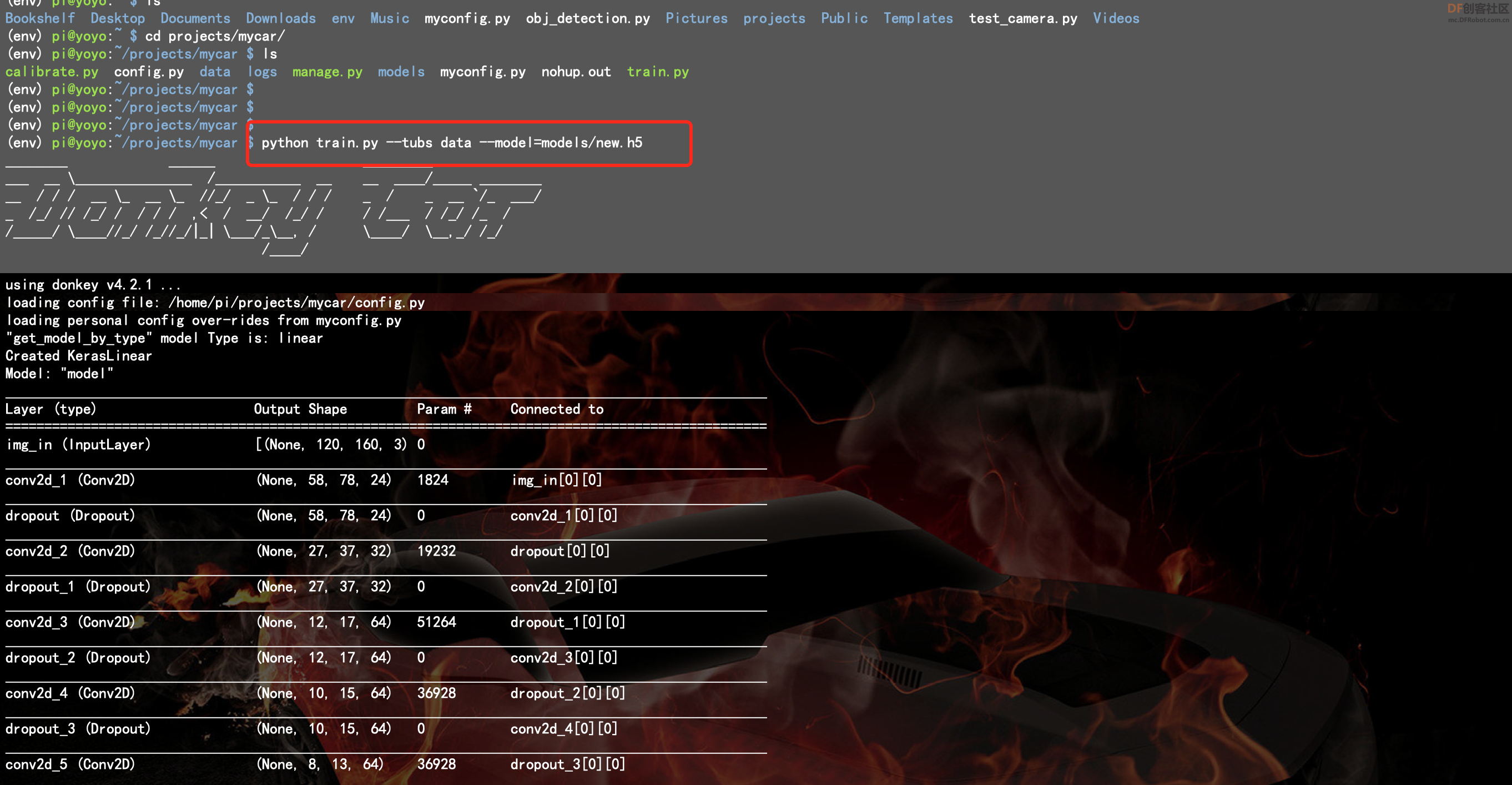



 创作达人
创作达人
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖






