|
|
[项目] 【Arduino】168种传感器系列实验(209)---移远 BC20 NB+GNSS模块 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百零九:Gravity: I2C & UART BC20 NB-IoT & GNSS通信模块 NB-IoT广域低功耗无线通信 GPS/北斗精准定位 户外物联网必备 项目二十二:串口监视器上可以看到NB模块被PSM周期性唤醒进入 实验开源代码 |
|
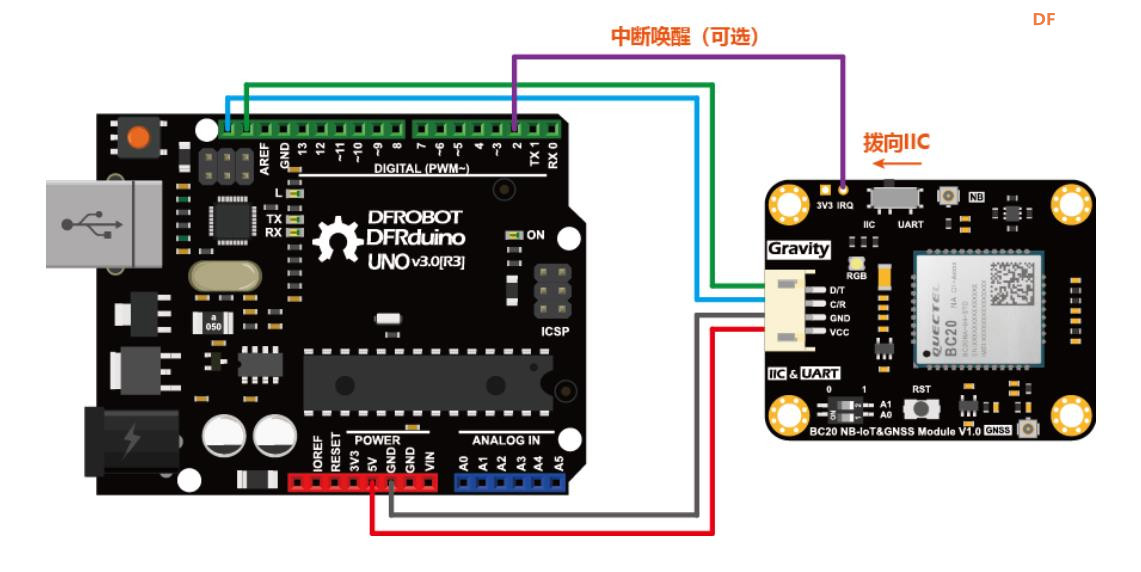
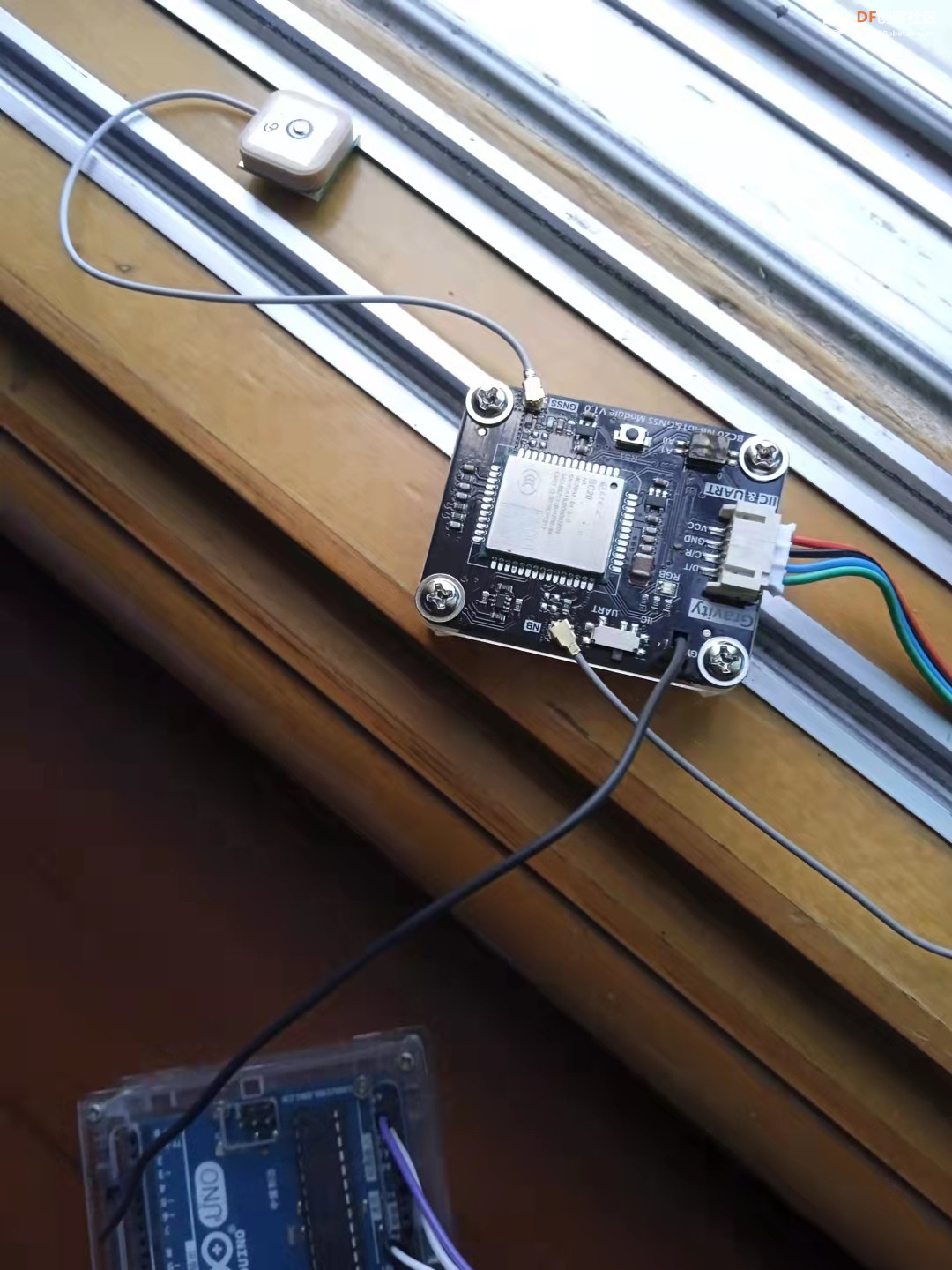
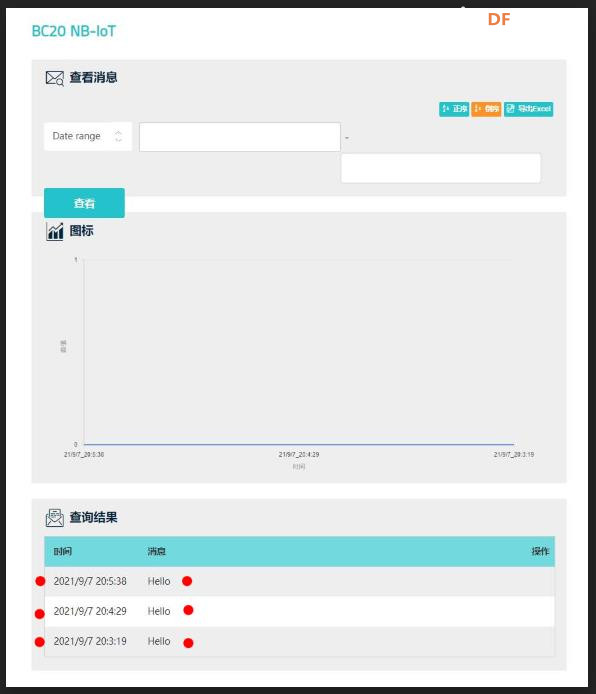
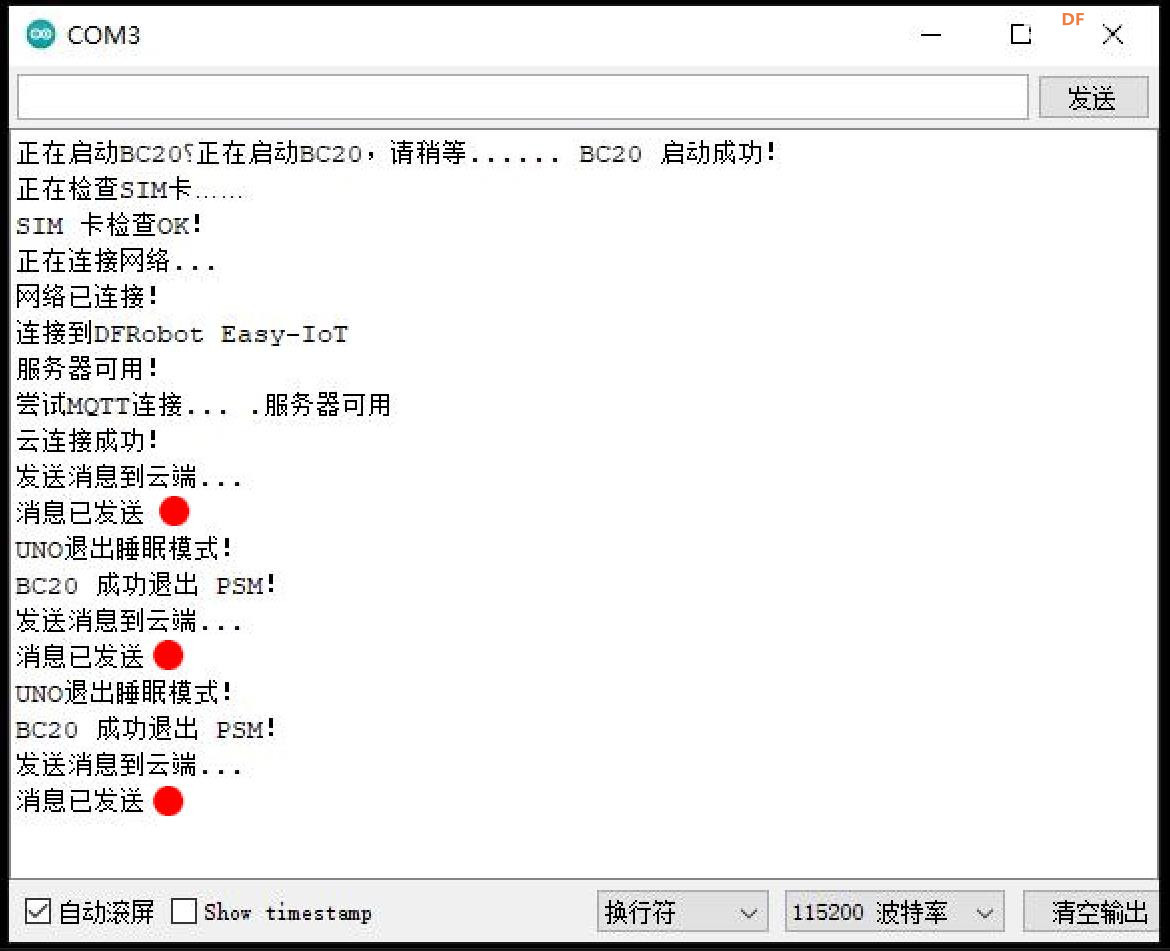
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百零九:Gravity: I2C & UART BC20 NB-IoT & GNSS通信模块 NB-IoT广域低功耗无线通信 GPS/北斗精准定位 户外物联网必备 项目二十三:在串行监视器上循环低功耗唤醒,然后将消息上传到云端 实验开源代码 |
|
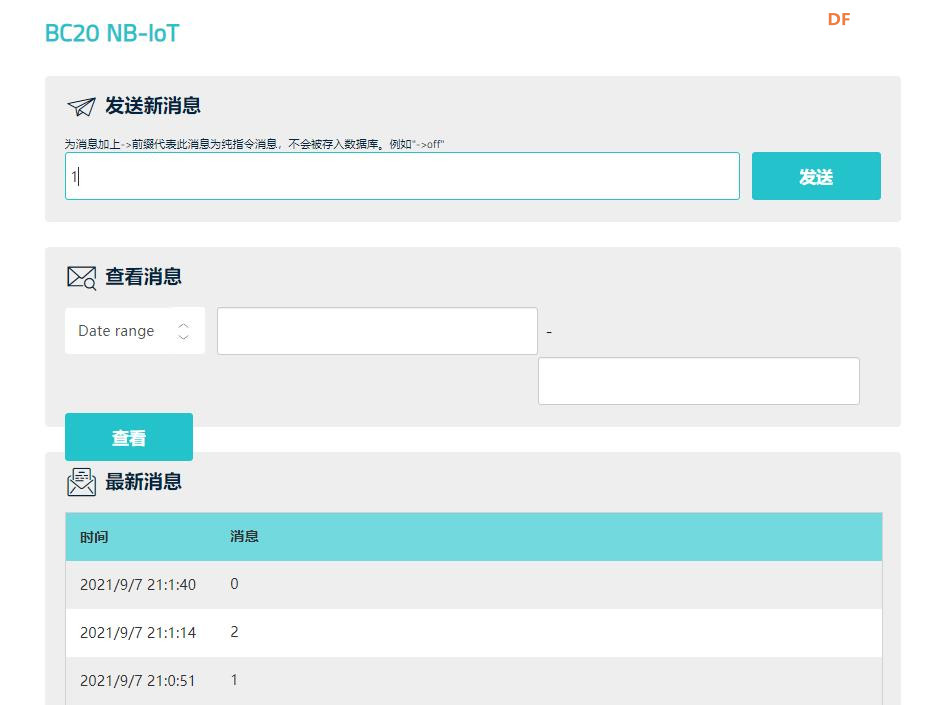
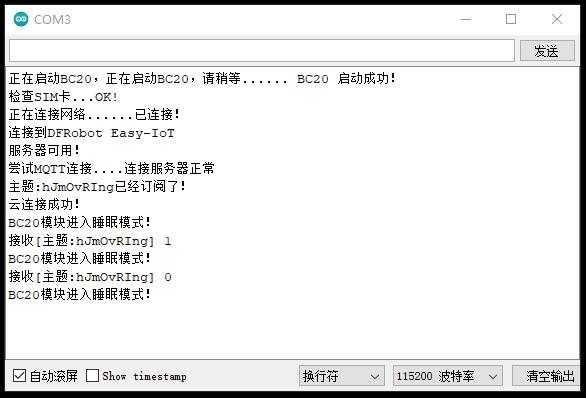
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百零九:Gravity: I2C & UART BC20 NB-IoT & GNSS通信模块 NB-IoT广域低功耗无线通信 GPS/北斗精准定位 户外物联网必备 项目二十四:通过Easy-IOT平台发布消息(数字0或1),唤醒BC20模块 实验开源代码 |
DFRobot_BC20_Gravity库部分函数 |
DFRobot_BC20_Gravity库部分函数之二 |
DFRobot_BC20_Gravity库部分函数之三 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed




 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






