|
|
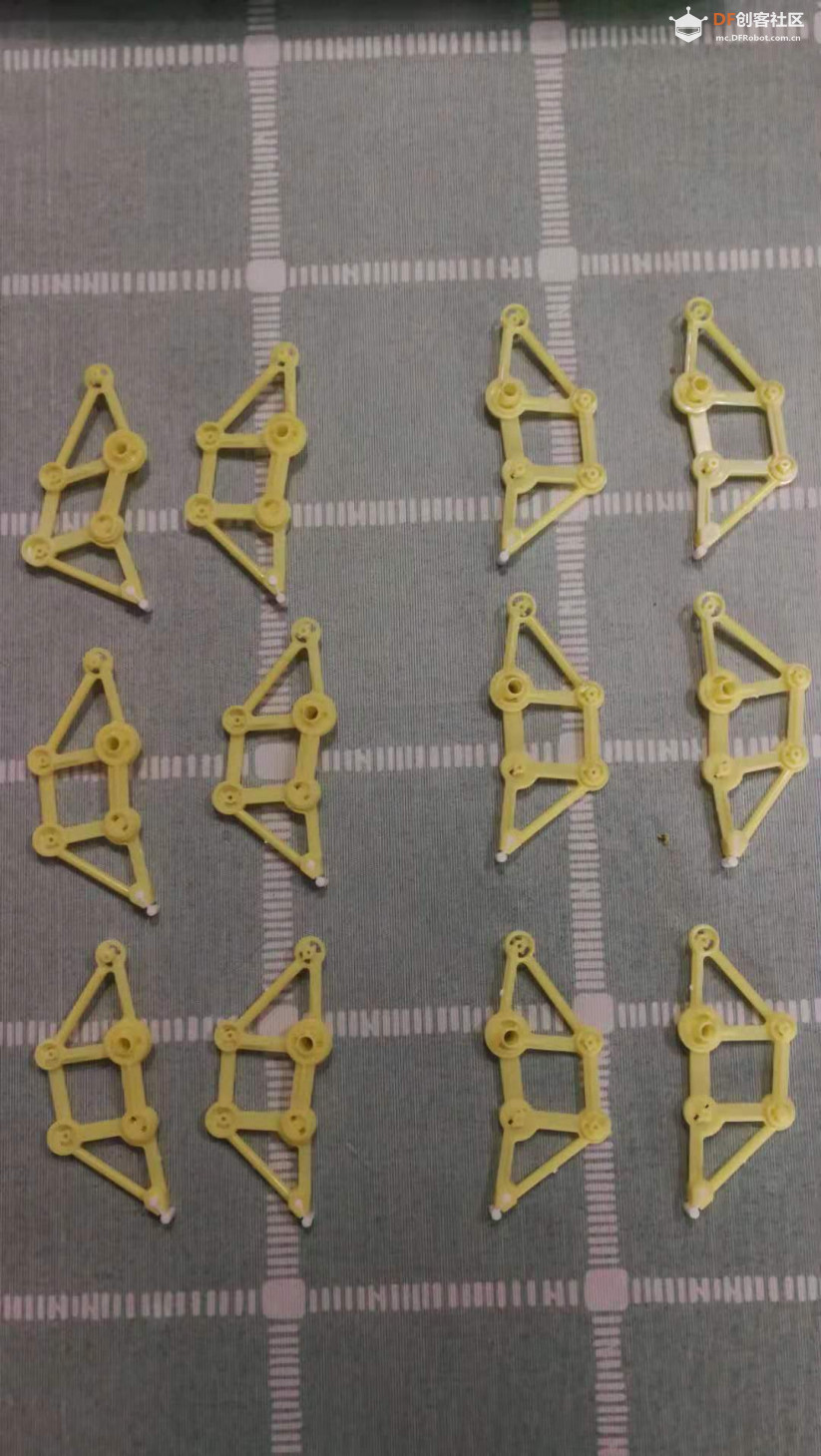
[知识点] 连杆形式的腿机构十一种:盘点机器人行走背后的机械原理 |
|
附件一:连杆机构几个简单概念 1)运动链中固定不动的构件称为机架;机构中按给定的已知运动规律独立运动的构件称为原动件;其余构件称为从动件。 2)四杆机构中,能独立运动的构件称为原动件;与机架相连的构件称为连架杆,其中能作整周转动的连架杆称为曲柄,只能在小于360°范围内转动的称为摇杆;不直接与机架相连的构件称为连杆,连杆作平面运动。 3)自由度大于零称为机构;若自由度小于等于零,则称为桁架。 4)机构具有确定运动的条件:原动件的数目与机构的自由度(或独立运动参数的数目)相等。若原动件数小于机构的自由度,则机构的运动不能完全确定。若原动件数大于机构的自由度,机构被卡死或损坏。 5)平面机构自由度计算公式(注意区分复合铰链、局部自由度、虚约束): F=3n-(2PL+PH) 式中:F为机构自由度,n为活动构件数(机架除外),PL为低副个数,PH为高副个数。 注:通过面接触而构成的运动副称为低副,低副约束两个自由度;通过点或线接触而构成的运动副称为高副,高副约束一个自由度,常见高副 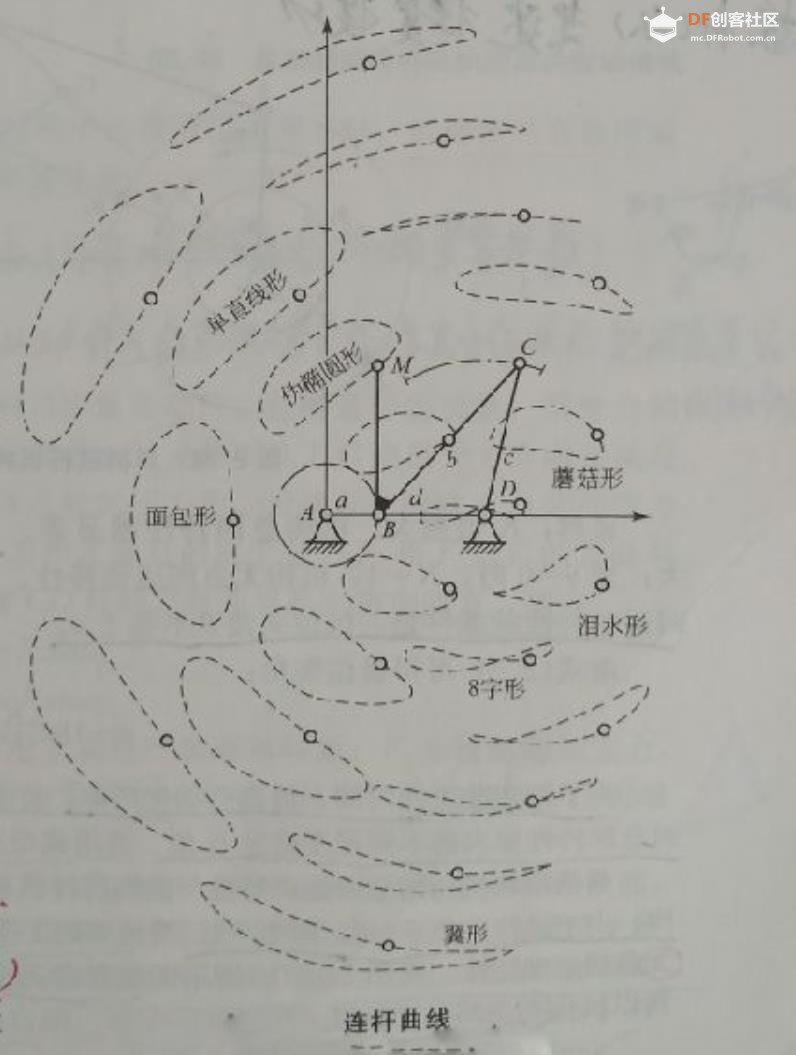 |
|
附件二:腿机构(Leg Mechanism)的设计要求 腿机构(或者叫 行走机构)是一种旨在模仿人类或动物行走运动的连杆机构。机械腿可以有一个或多个驱动,可以实现简单的平面运动或复杂的空间运动。 提起连杆机构形式的腿机构,我们一般可以想到Jansen制作的沙滩怪兽。  腿机构的设计要求一般可以表述为: 1. 接触地面时的垂直速度尽量恒定; 2. 当支脚不接触地面时,应尽快移动; 3. 恒定的力矩/力输入(至少不要有极端的峰值); 4. 足够的步幅高度; 5. 对于2条腿或4条腿机构,支脚需要有至少1/2的运动周期接触地面;对于3条腿或6条腿机构,支脚需要有至少1/3的运动周期接触地面; 6. 最小化的运动质量; 7. 质心总是在支撑底座内部; 8. 转向时,每条腿(或每组腿)应分别控制; 9. 腿机构能够实现前行和后退。 (当然还有其他的设计指标......) |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed









 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






