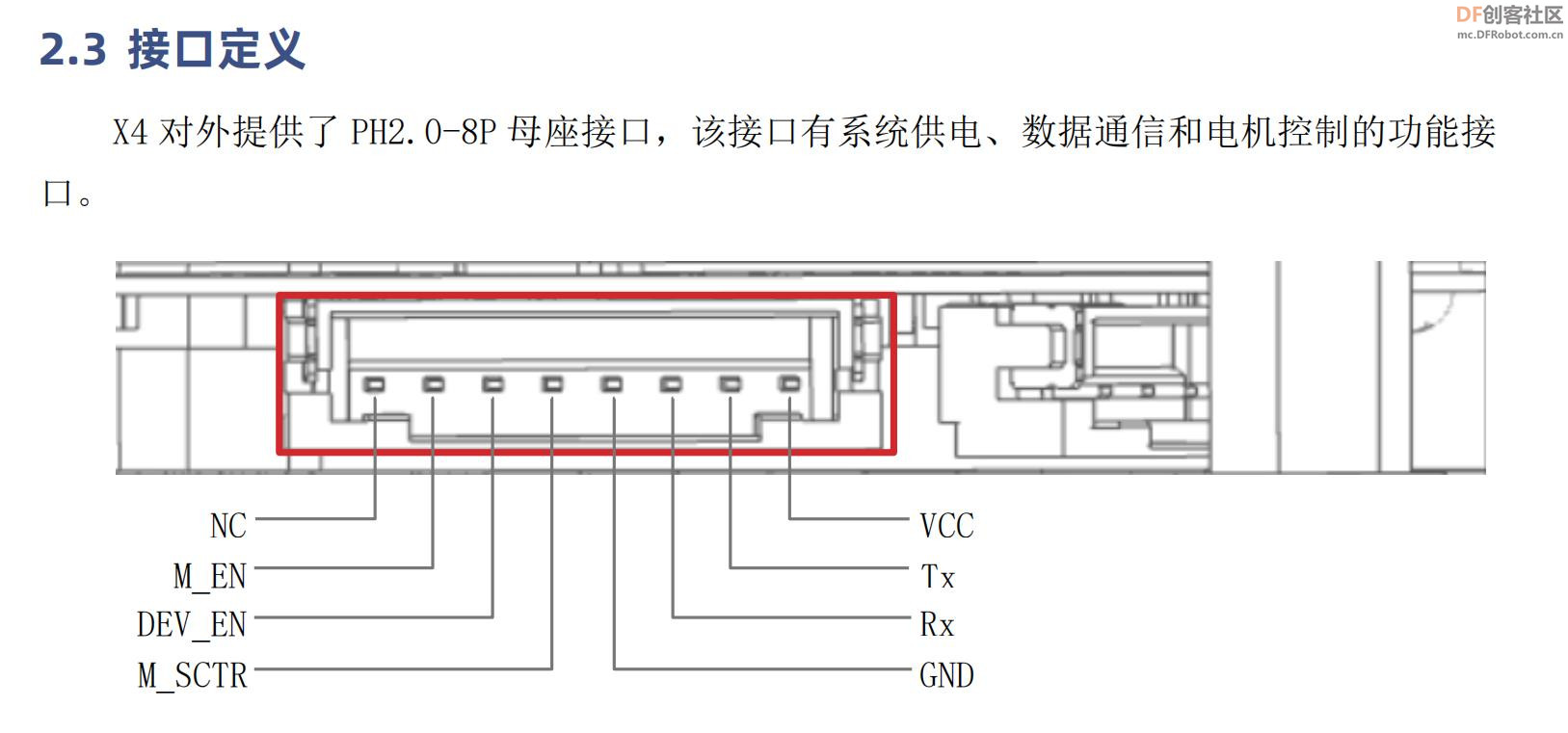
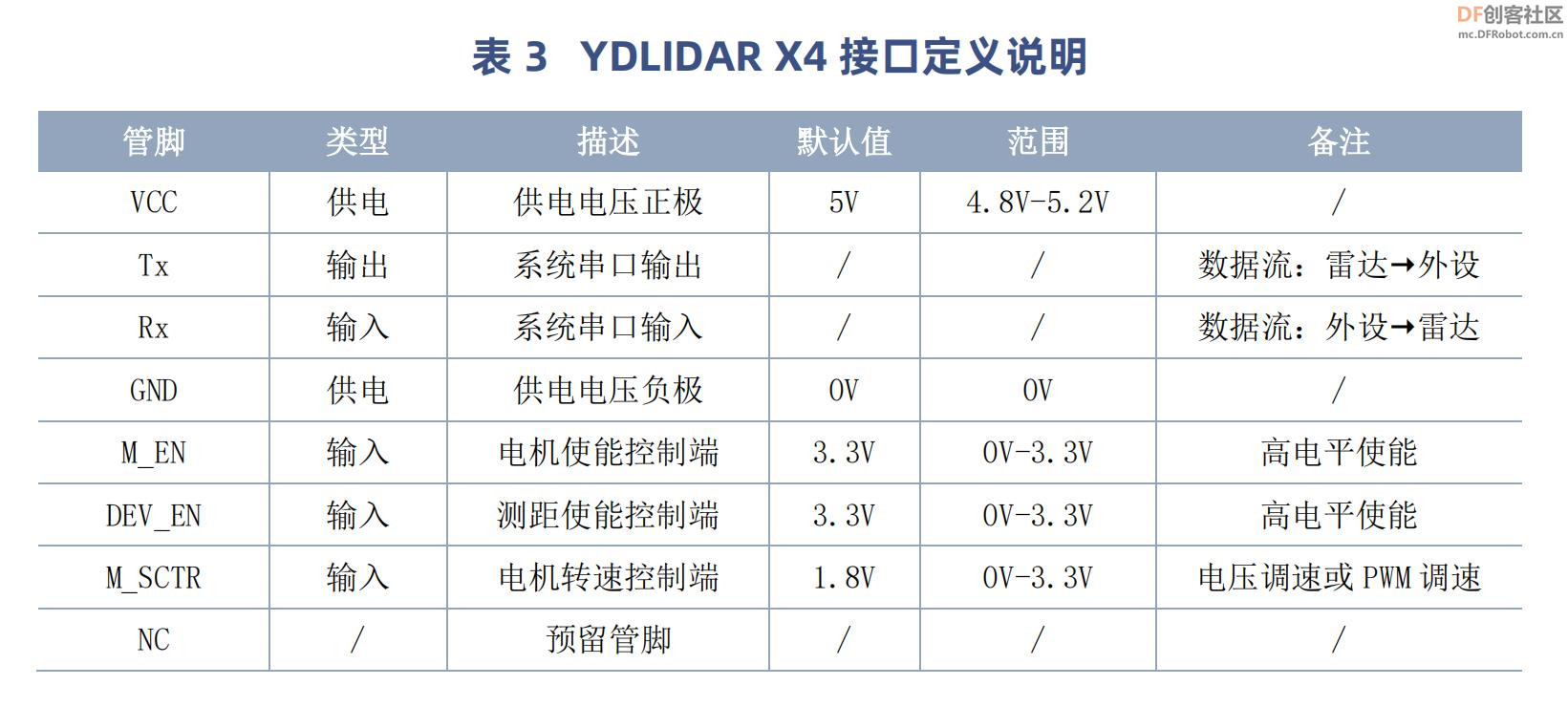
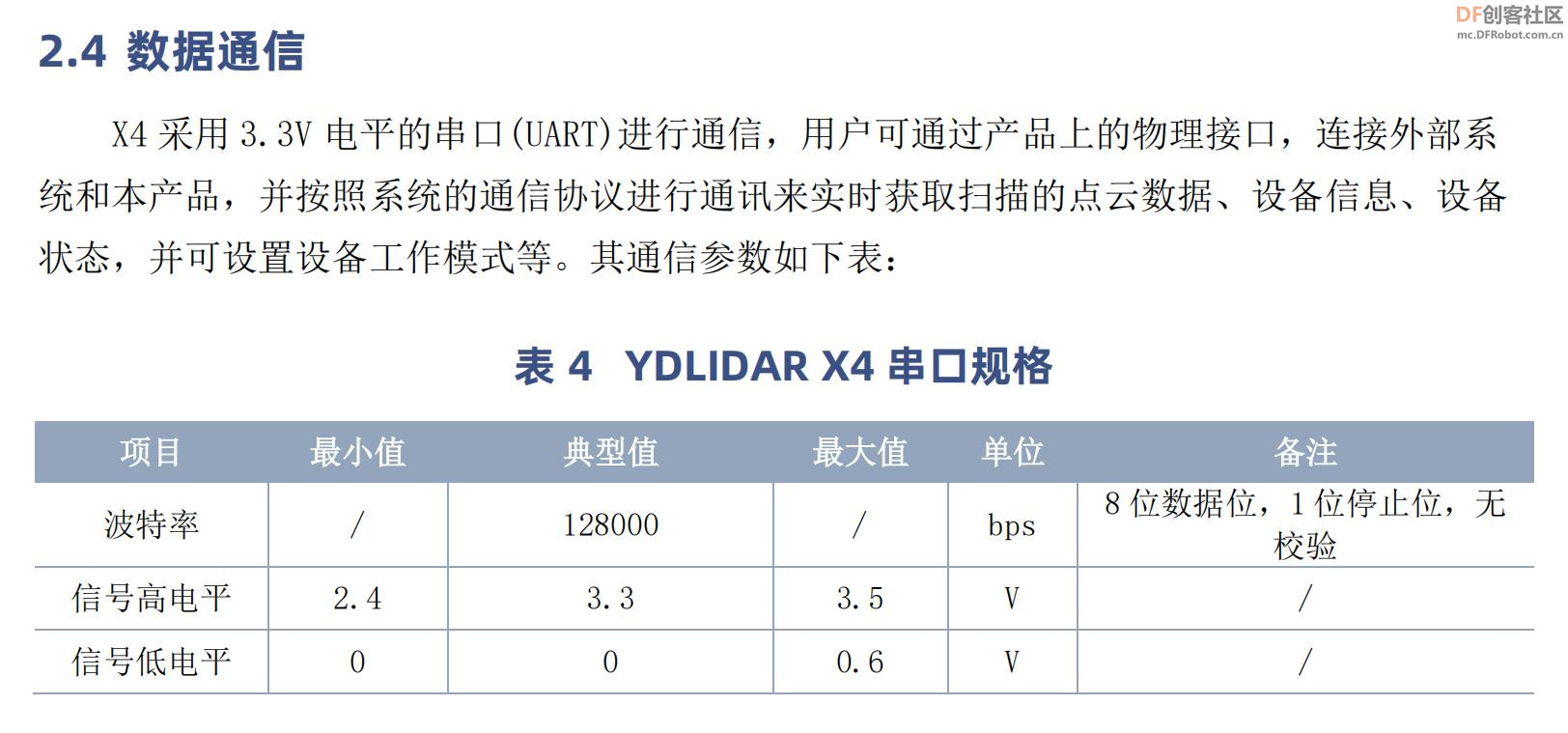
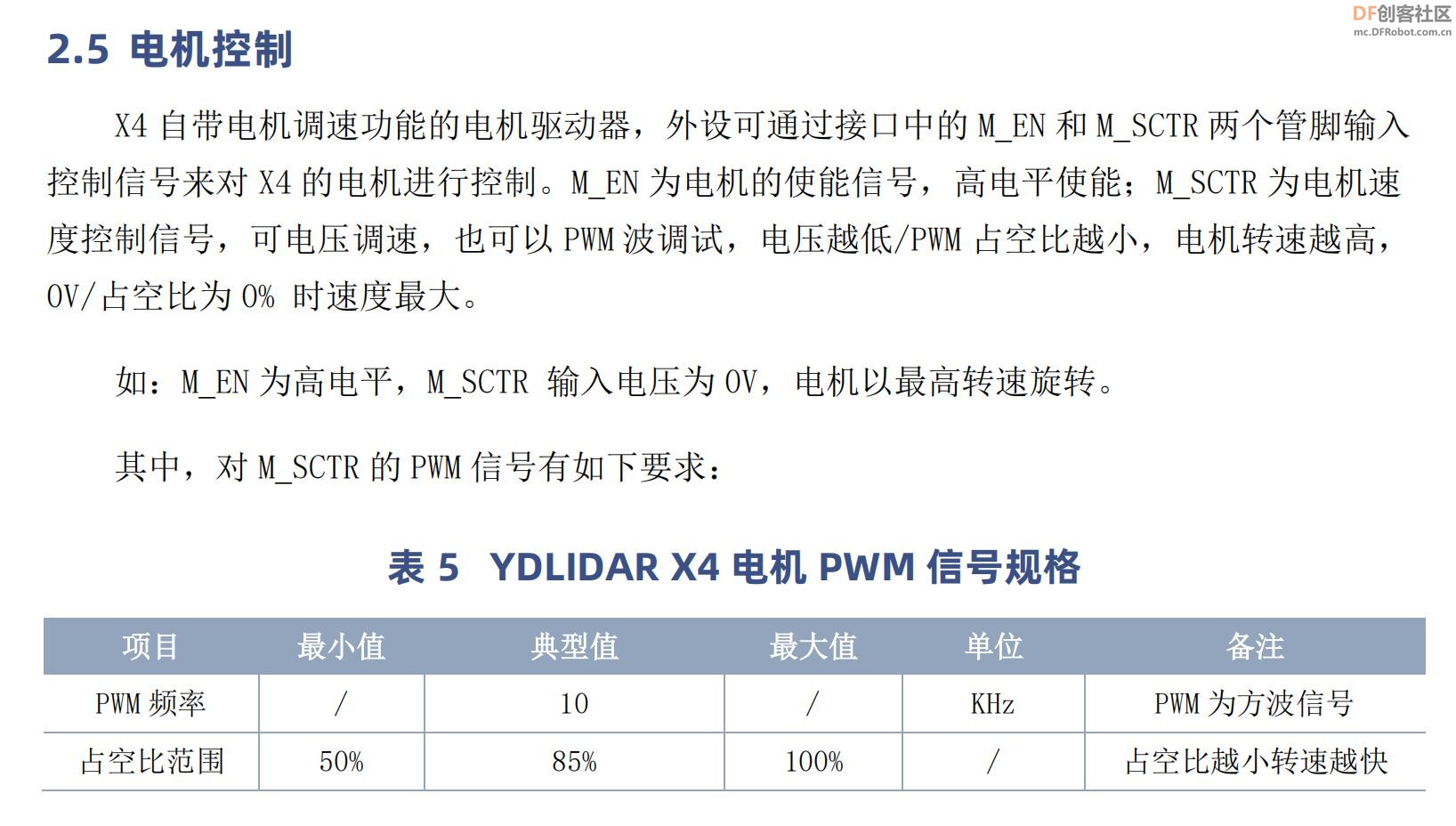
|
49901| 99
|
[项目] 【Arduino】168种传感器系列实验(221)---360°激光雷达模块 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十一:360°旋转扫描激光雷达测距传感器 ROS机器人建图导航定位 ROS小车导航路径规划避障模块(EAI YDLIDAR X4) 项目之一:从 RPLIDAR 获取数据的简单通用方法(您可以基于此模板自由添加您的应用程序代码) 实验接线: 1、将 RPLIDAR 的串行端口 (RX/TX/GND) 连接到您的 Arduino 板(引脚 0 和引脚 1) 2、将 RPLIDAR 的电机控制引脚连接到 Arduino 板引脚 3 |
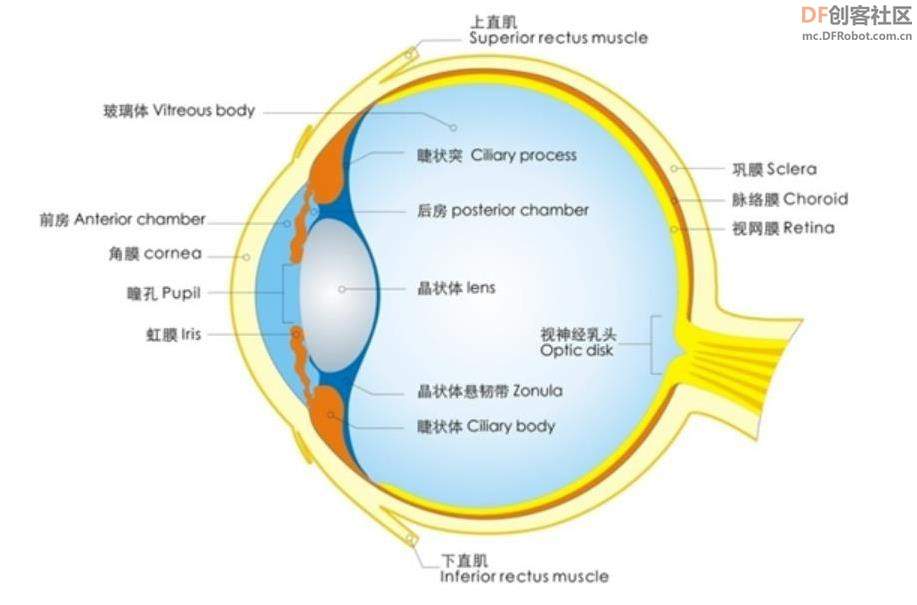 激光雷达实验的特别安全注意事项: 1、可能对人眼的伤害——严重暴露在激光下可能会造成对角膜和视网膜的伤害,伤害的位置和范围取决于激光的波长和级别。长期接触可能造成白内障或者视网膜损伤,严重暴露在高级别激光下也会造成同样的结果。佩带合适的激光防护眼镜或者其他工程防护手段可以很容易的预防激光对眼睛的伤害。 2、眼睛的基本结构组成如图。光线经过视网膜,瞳孔聚焦到视网膜上成像。激光对眼睛视觉的伤害是激光产品最大的潜在危险。不同波长的激光会损害眼睛的不同结构,其对眼睛的损害程度也不仅相同。可见光以及近红外(400nm-1400nm)的激光损伤视网膜。因为激光经角膜,水晶体等屈光介质的汇聚作用,会使到达视网膜的激光辐射量(火辐照度)比角膜处高出约10万倍。例如有1mW/cm2能量的光进入眼睛,经过眼睛聚焦后到达视网膜上的辐射能量将达到100W/cm2。 3、视网膜的损伤,可见和红外光谱范围400nm-1400nm,可见和红外波段穿透角膜在视网膜的很小区域内(黄斑处)聚焦。这一过程极大的增强了光能量密度,增加了伤害的可能性。视网膜上局域化的加热并伴随对光的吸收将会导致视网膜上的损伤。 4、晶状体的损伤,紫外光谱范围315-400nm,波长在这一波段的光主要被晶状体所吸收,对晶状体造成损伤,不管使光化学损伤,还是热损伤,都会破坏晶状体各组织层之间的精确关系。这将导致散射区域的增加—造成白内障。在通常情况下,晶状体将随着年龄而老化。暴露于紫外波段将加速这种老化并可能导致老花眼(晶状体失去调节或者聚焦共嫩功能)。红外光谱范围1.4um-100um,眼睛的角膜对红外辐射是不透明的,光速能量被眼睛表面吸收并对角膜有热损伤。过渡暴露在红外光下会导致眼睛模糊或者造成角膜表面的不规则。紫外 100-315nm,眼睛的角膜对紫外辐射也是不透明的,当有红外辐射时,光速的能量被眼睛表面吸收并对角膜有损伤。过渡的紫外暴露会导致光角膜炎(像电焊弧造成的),昼盲,红眼,流泪等。在光化学损伤的症状出现之间,会有6-12小时的潜伏期。 5、3A级激光器产生可见或不可见激光,通常用肉眼短时间观察不会产生危害。对发射波长为400-700nm的激光,由包括眨眼反射在内的回避反应提供保护。对于其他波长对裸眼的危害不大于1类激光器。用光学装置,如望远镜,显微镜等直接进行3A类的光束内观测时危险的。若只是短时间看到,人眼会对光的保护反射会起到一定的保护作用,但是如果光斑聚焦时进入人眼,则会对人眼造成伤害。 |
 激光(laser) 是20世纪以来继核能、电脑、半导体之后,人类的又一重大发明,被称为“最快的刀”、“最准的尺”、“最亮的光”。英文名Light Amplification by Stimulated Emission of Radiation,意思是“通过受激辐射光扩大”。激光的英文全名已经完全表达了制造激光的主要过程。激光的原理早在 1916年已被著名的犹太裔物理学家爱因斯坦发现。 原子受激辐射的光,故名“激光”。激光:原子中的电子吸收能量后从低能级跃迁到高能级,再从高能级回落到低能级的时候,所释放的能量以光子的形式放出。被引诱(激发)出来的光子束(激光),其中的光子光学特性高度一致。因此激光相比普通光源单色性、方向性好,亮度更高。 激光应用很广泛,有激光打标、激光焊接、激光切割、光纤通信、激光测距、激光雷达、激光武器、激光唱片、激光矫视、激光美容、激光扫描、激光灭蚊器、LIF无损检测技术等等。激光系统可分为连续波激光器和脉冲激光器。 |
 雷达(RADAR) 是英文“Radio Detection and Ranging”(无线电侦测和定距)的缩写及音译。意思为“无线电探测和测距”,即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。雷达是利用电磁波探测目标的电子设备。雷达发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。 雷达的出现,是由于一战期间当时英国和德国交战时,英国急需一种能探测空中金属物体的雷达(技术)能在反空袭战中帮助搜寻德国飞机。二战期间,雷达就已经出现了地对空、空对地(搜索)轰炸、空对空(截击)火控、敌我识别功能的雷达技术。二战以后,雷达发展了单脉冲角度跟踪、脉冲多普勒信号处理、合成孔径和脉冲压缩的高分辨率、结合敌我识别的组合系统、结合计算机的自动火控系统、地形回避和地形跟随、无源或有源的相位阵列、频率捷变、多目标探测与跟踪等新的雷达体制。 后来随着微电子等各个领域科学进步,雷达技术的不断发展,其内涵和研究内容都在不断地拓展。雷达的探测手段已经由从前的只有雷达一种探测器发展到了红外光、紫外光、激光以及其他光学探测手段融合协作。当代雷达的同时多功能的能力使得战场指挥员在各种不同的搜索/跟踪模式下对目标进行扫描,并对干扰误差进行自动修正,而且大多数的控制功能是在系统内部完成的。自动目标识别则可使武器系统最大限度地发挥作用,空中预警机和JSTARS这样的具有战场敌我识别能力的综合雷达系统实际上已经成为了未来战场上的信息指挥中心。  |
|
激光雷达(Laser Radar ) 也称光学雷达(LIght Detection And Ranging)是激光探测与测距系统的简称,它通过测定传感器发射器与目标物体之间的传播距离,分析目标物体表面的反射能量大小、反射波谱的幅度、频率和相位等信息,从而呈现出目标物精确的三维结构信息。 自上世纪60年代激光被发明不久,激光雷达就大规模发展起来。目前激光雷达厂商主要使用波长为 905nm 和 1550nm 的激光发射器,波长为 1550nm 的光线不容易在人眼液体中传输,这意味着采用波长为 1550nm 激光的激光雷达的功率可以相当高,而不会造成视网膜损伤。更高的功率,意味着更远的探测距离,更长的波长,意味着更容易穿透粉尘雾霾。但受制于成本原因,生产波长为1550纳米的激光雷达,要求使用昂贵的砷化镓材料。厂商更多选择使用硅材料制造接近于可见光波长的 905nm 的激光雷达,并严格限制发射器的功率,避免造成眼睛的永久性损伤。 而测距原理上目前主要以飞行时间(time of flight)法为主,利用发射器发射的脉冲信号和接收器接受到的反射脉冲信号的时间间隔来计算和目标物体的距离。也有使用相干法,即为调频连续波(FMCW)激光雷达发射一束连续的光束,频率随时间稳定地发生变化。由于源光束的频率在不断变化,光束传输距离的差异会导致频率的差异,将回波信号与本振信号混频并经低通滤波后,得到的差频信号是光束往返时间的函数。调频连续波激光雷达不会受到其他激光雷达或太阳光的干扰且无测距盲区;还可以利用多普勒频移测量物体的速度和距离。调频延续波 LiDAR 概念并不新颖,但是面对的技术挑战不少,例如发射激光的线宽限制、线性调频脉冲的频率范围、线性脉冲频率变化的线性度,以及单个线性调频脉冲的可复制性等。  |
|
激光雷达的结构 主要包括激光发射、接收、扫描器、透镜天线和信号处理电路组成。激光发射部分主要有两种,一种是激光二极管,通常有硅和砷化镓两种基底材料,再有一种就是目前非常火热的垂直腔面发射(VCSEL)(比如 iPhone 上的 LiDAR),VCSEL 的优点是价格低廉,体积极小,功耗极低,缺点是有效距离比较短,需要多级放大才能达到车用的有效距离。激光雷达主要应用了激光测距的原理,而如何制造合适的结构使得传感器能向多个方向发射激光束,如何测量激光往返的时间,这便区分出了不同的激光雷达的结构。 激光雷达的分类,主要有机械式,混合固态式,光学相控阵式(OPA)和泛光面阵式(FLASH)等。 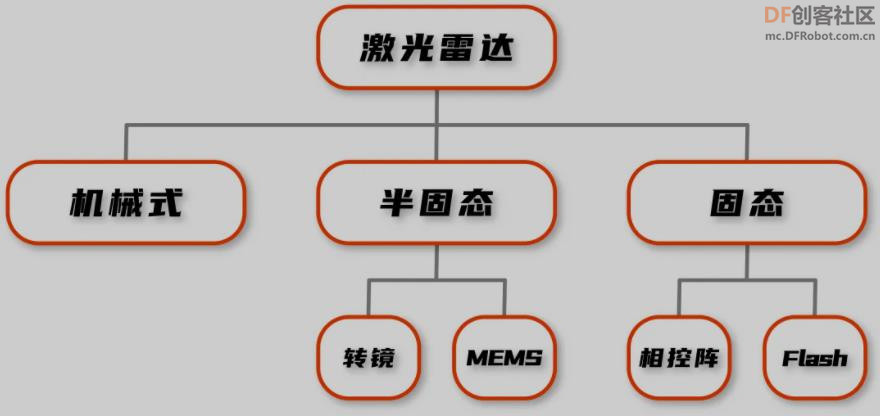 |
 激光雷达的趋势 1、传感器车规化——固态激光雷达取消了机械结构,能够击中目前机械旋转式的成本和可靠性的痛点,是激光雷达的发展方向。除了这两大迫切解决的痛点外,目前量产的激光雷达探测距离不足,仅能满足低速场景(如厂区内、校园内等)的应用。日常驾驶、高速驾驶的场景仍在测试过程中。 当前机械式激光雷达的价格十分昂贵,Velodyne 在售的 64/32/16 线产品的官方定价分别为 8 万/4 万/8 千美元。一方面,机械式激光雷达由发射光源、转镜、接收器、微控马达等精密零部件构成,制造难度大、物料成本较高;另一方面,激光雷达仍未大规模进入量产车、需求量小,研发费用等固定成本难以摊薄。 量产 100 万台 VLP-32后,那么其售价将会降至 400 美元左右。 2、多传感器融合——在环境监测传感器中,超声波雷达主要用于倒车雷达以及自动泊车中的近距离障碍监测,摄像头、毫米波雷达和激光雷达则广泛应用于各项 ADAS 功能中。四类传感器的探测距离、分辨率、角分辨率等探测参数各异,对应于物体探测能力、识别分类能力、三维建模、抗恶劣天气等特性优劣势分明。各种传感器能形成良好的优势互补,融合传感器的方案已成为主流的选择。 |
|
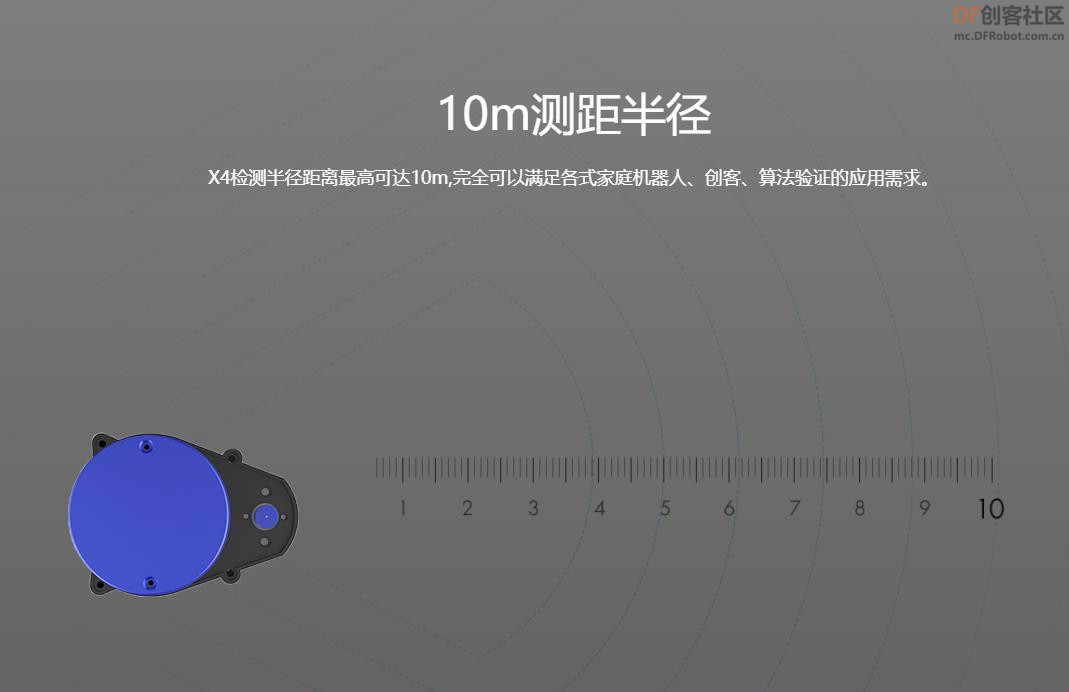
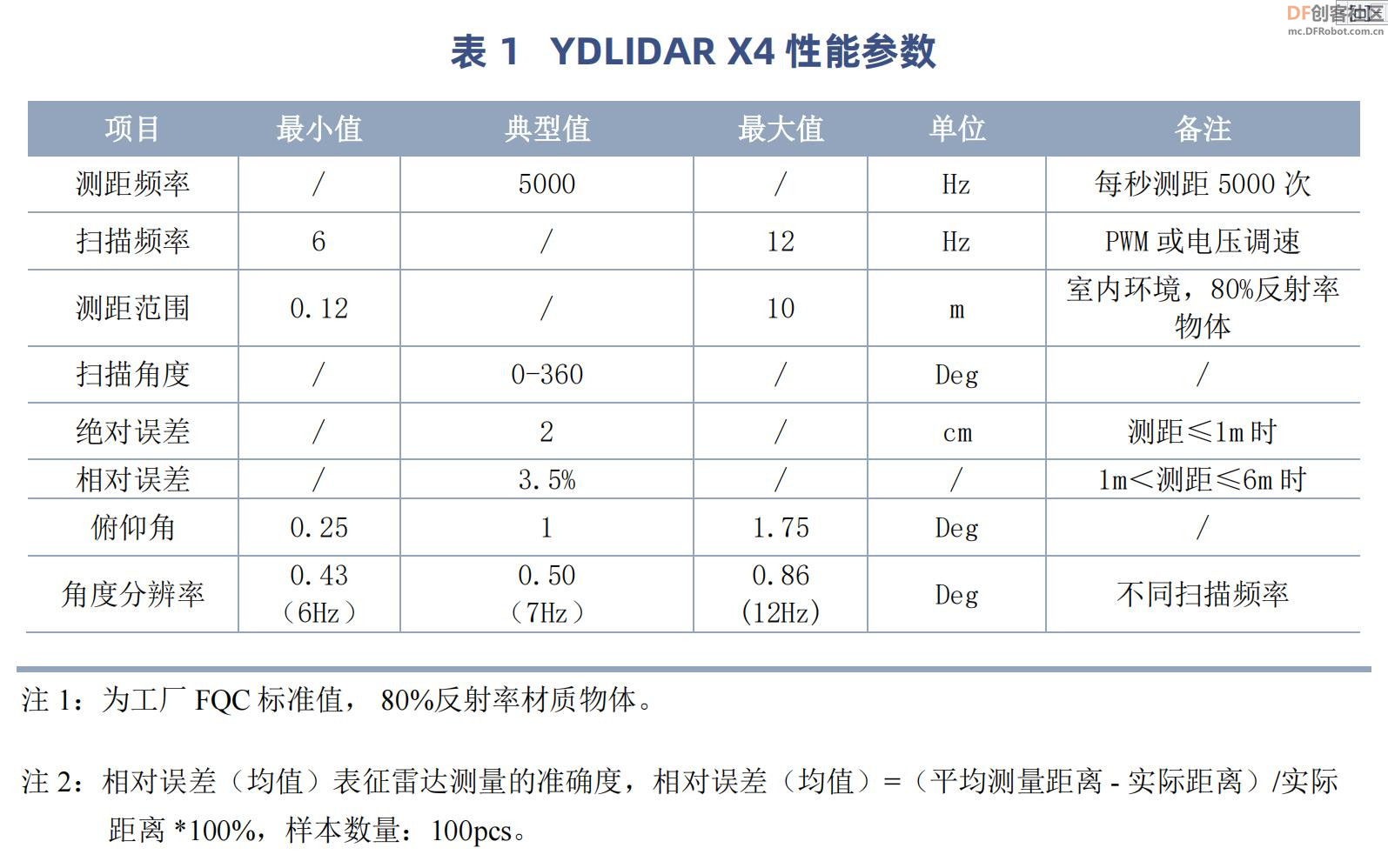
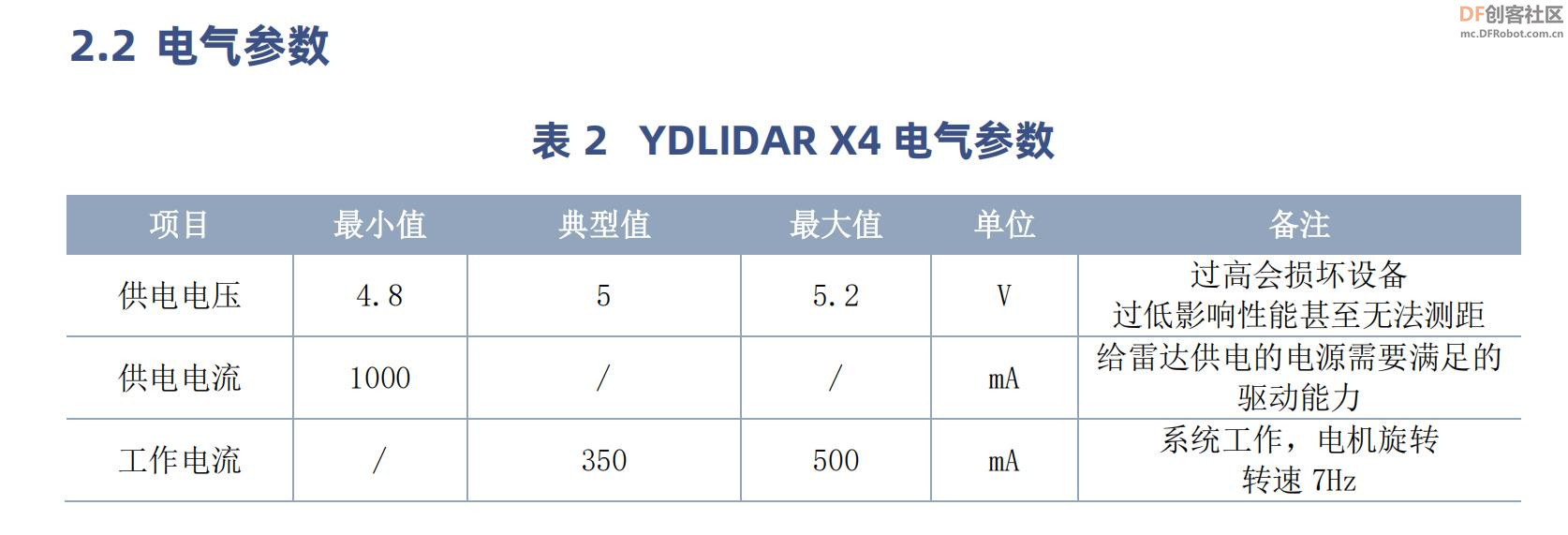
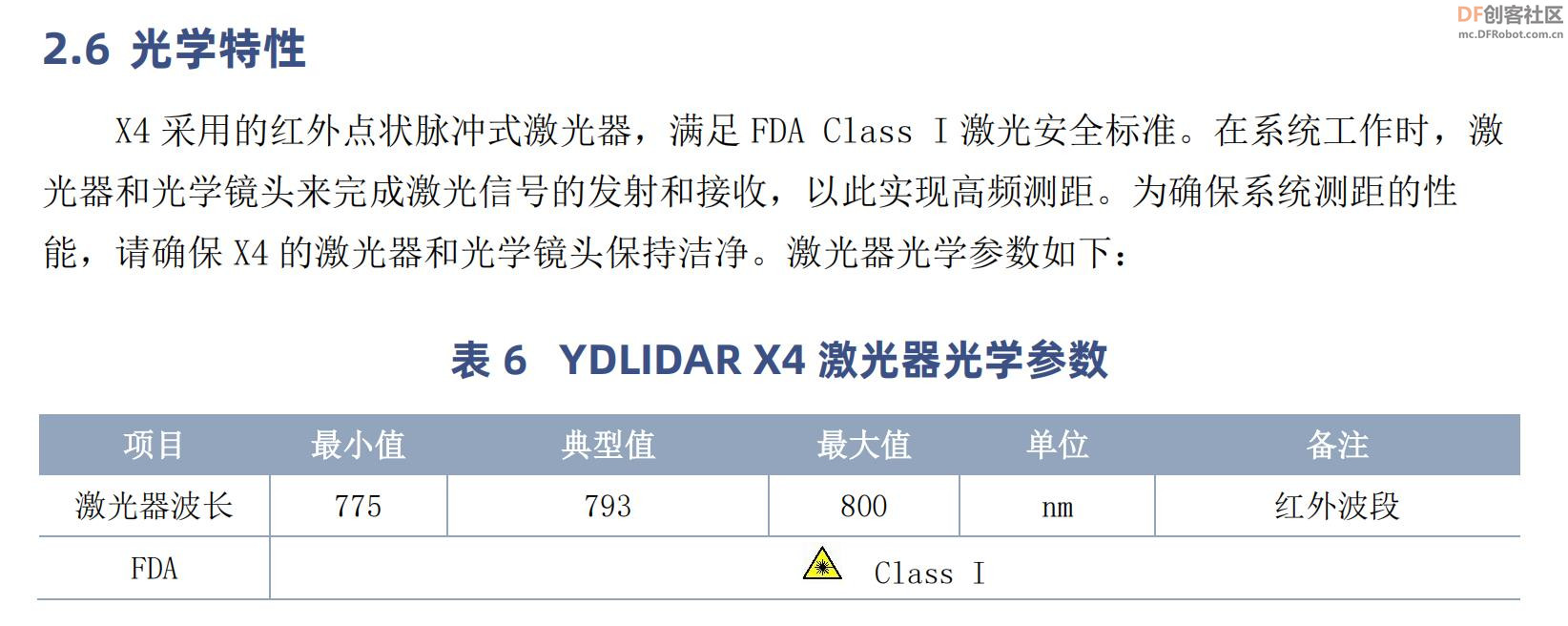
YDLIDAR X4 激光雷达 是一款 360 度二维测距产品,基于三角测距原理,并配以相关光学、电学、算法设计,实现高频高精度的距离测量,在测距的同时,机械结构 360 度旋转,不断获取角度信息,从而实现了 360 度扫描测距,输出扫描环境的点云数据。 主要特性 ➢ 360 度全方位扫描测距 ➢ 测距误差小,测距稳定性好,精度高 ➢ 测距范围广 ➢ 抗环境光干扰能力强 ➢ 功耗低,体积小,性能稳定,寿命长 ➢ 激光功率满足 Class I 级别的激光器安全标准 ➢ 电机转速可调,扫描频率为 6Hz~12Hz ➢ 高速测距,测距频率可达 5KHz 应用场景 ➢ 机器人导航及避障 ➢ 机器人 ROS 教学、研究 ➢ 区域安防 ➢ 环境扫描及 3D 重建 ➢ 家用服务机器人/扫地机器人的导航及避障 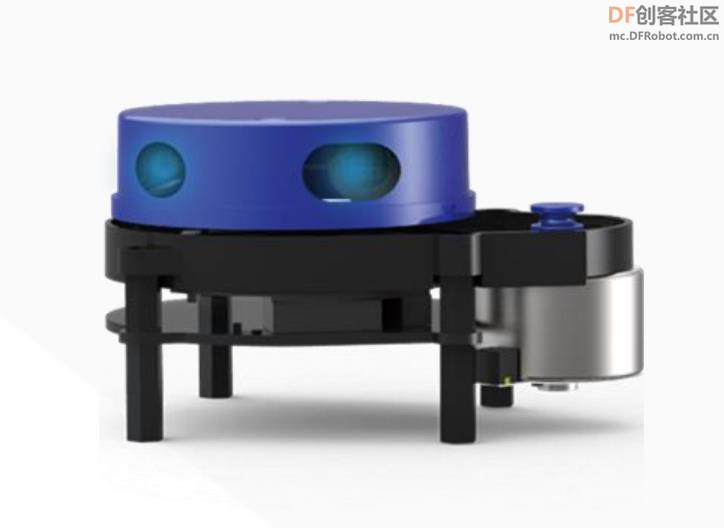 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






